Path Planner Funktionen
Feldgrenzen
Erfassen und validieren Sie Feldgrenzen aus mehreren Quellen mit automatischer Vorverarbeitung für eine optimale Spurplanung.
Importmethoden

Verbundenes OEM-FMIS
Importieren Sie direkt aus John Deere, CNHi und anderen großen Maschinenplattformen.
Shapefile-/ISO-Import
Laden Sie standardmäßige GIS-Shapefiles aus jedem FMIS hoch.
Manuelles Zeichnen
Zeichnen Sie Grenzen direkt auf Satellitenbildern mit Präzisionswerkzeugen.
Satellitenauswahl
Wählen Sie in Sekunden aus vorverarbeiteten globalen Satellitenbildern aus.
Automatische Vorverarbeitung
- Validierung: Stellt die geometrische Integrität sicher und entfernt ungültige Daten
- Vereinfachung: Beseitigt Rauschen und redundante Punkte für eine schnellere Verarbeitung
- Glättung: Optimiert die Grenzkurven für realistische Maschinenwege
- Ausschlusszonen: Definieren Sie befahrbare und nicht befahrbare Hindernisse (Wasserläufe, Masten, Naturzonen)
Feldzerlegung
Teilen Sie komplexe Felder in optimierte Teilfelder auf, um die Effizienz zu steigern, Wendungen zu reduzieren und Bodenverlust zu minimieren.
Manuelle Zerlegung
- Punkte hinzufügen und Linien durch sie ziehen
- Trennlinien frei zeichnen
- Externe Referenzlinien aus Drittanbieter-Apps importieren
- Automatische Aufteilung von Hindernissen über Teilfelder hinweg
Automatische Zerlegung
- Gerade Linie: Erstellt konvexe Teilfelder, um Wendungen zu reduzieren
- Kurvenbasiert: Nutzt Höhenlinien für terrassierte Felder
- Proprietärer Algorithmus identifiziert optimale Trennpunkte
- Maximiert die Abdeckung bei minimalem Bodenverlust


Vorgewende-Verwaltung
Erzeugen Sie optimierte Vorgewende-Überfahrten mit adaptiver Glättung für jeden Wenderadius und jede regionale Praxis.
Vorgewende-Typen
Vollständige Umfangsüberfahrten
Eine oder mehrere komplette Schleifen um Feldgrenzen und Ausschlusszonen.
Vorgewende nur an Wendungen
Abdeckung nur dort, wo Maschinen tatsächlich wenden, was unnötige Überfahrten reduziert.
Kein Vorgewende
Für Felder mit zugänglichen Straßen oder Wegen zum Wenden außerhalb der Grenze.
Erweiterte Funktionen
- Eckenglättung: Eckige oder abgerundete Ecken, passend zu jedem Wenderadius
- Punktvereinfachung: Entfernt Rauschen für sauberere, besser lenkbare Wege
- Adaptive Kurven: Ermöglicht die Ausführung im Feld mit Lenksystemen
- Regionale Anpassung: Passt sich an lokale landwirtschaftliche Praktiken an

Vorgewende

Kein Vorgewende
Grenzanalyse
Maschinelles Lernen und Computer Vision extrahieren kritische Merkmale aus Grenzen für eine intelligente Spurplanung.
Gerade Kanten
Maschinelles Lernen identifiziert nahezu gerade Grenzsegmente für Ausrichtung und Vereinfachung.
Referenzkurven
Computergestützte Geometrie extrahiert lange gekrümmte Segmente, die für die Planung gekrümmter Spuren geeignet sind.
Höhengrenzen
Erkennt Cluster-Konturen aus DEM-Daten, natürliche topografische Grenzen, die einzelnen Höhenlinien überlegen sind.
Digitales Höhenmodell (DEM)
Erstellt 3D-Geländemodelle aus öffentlichen Datenquellen oder Maschinen-Telemetrie. Extrahiert topografische Merkmale wie Höhenlinien und natürliche Feldunterteilungen, die für die hangneigungsbewusste Planung und die Minimierung der Bodenerosion entscheidend sind.

Planung gerader Spuren
Kern-Spurplanungsalgorithmen erzeugen parallele gerade Spuren, optimiert für Abdeckung, Effizienz und mehrere Ziele.
Optimierungsziele
Primäre Ziele
- Operative Abdeckungsfläche maximieren
- Überlappung (Doppelabdeckung) minimieren
- Befahrbare und nicht befahrbare Hindernisse handhaben
Sekundäre Optimierung
- Anzahl der Wendungen minimieren
- Gesamtzeit und -strecke reduzieren
- Spitzenreihen minimieren (Vorgewende-Überlappung)
- Potenzial für Bodenverlust reduzieren
Ausrichtung und Rotation
- Ausrichtung an jeder Richtung (0-179° oder benutzerdefinierter Dezimalwert)
- Automatische Verschiebung für perfekte Kantenausrichtung
- Pläne drehen bei gleichbleibend optimaler Abdeckung
Erweiterte Muster
- Guess Row: Automatische Anpassung des Abstands, um Teilüberfahrten zu reduzieren
- Fanning: Schrittweise Richtungsänderung zwischen parallelen Kanten

Planung gekrümmter Spuren
Proprietäre Algorithmen erzeugen gekrümmte Spuren für unregelmäßige Grenzen und Gelände, deutlich komplexer als die Planung gerader Spuren.

Verarbeitung der Referenzkurve
Gekrümmte Spuren werden durch Versetzen von Referenzkurven (Grenzkurven, Höhenlinien oder Cluster-Konturen) erzeugt. Die Vorverarbeitung stellt sicher, dass die Kurven für die Spurplanung geeignet sind:
- Entfernt gewundene, eingeschnürte und sich selbst schneidende Segmente
- Stellt die Lenkbarkeit für reale Maschinen sicher
- Validiert die geometrische Machbarkeit
Orthogonale Projektion
Projiziert Referenzkurven in eine oder beide Richtungen um die Spurbreite, bis das Feld abgedeckt ist. Hält den senkrechten Abstand gleich der Spurbreite für eine vollständige Abdeckung.
- Lockert die Orthogonalität, wenn sich Spuren einschnüren, um die Lenkbarkeit zu erhalten
- Wendet eine Glättung auf jede Spur an, bevor die nächste erzeugt wird
- Steuert die Knotendichte, um übermäßig komplexe Wege zu vermeiden
Doppelte Referenzkurven
Bei terrassierten Feldern werden zwei Referenzkurven in Einklang gebracht, indem mit der orthogonalen Projektion der ersten Kurve begonnen und schrittweise an die Form der zweiten Kurve angepasst wird. Funktioniert am besten, wenn sich die Kurven leicht unterscheiden.
3D-Geländeplanung
Einzigartige Fähigkeit, in drei Dimensionen zu planen, das Bodenerosionspotenzial zu bewerten und Routen für unterschiedliche Höhen zu optimieren.
3D-Geländemodellierung
Erstellt 3D-Feldmodelle aus Digitalen Höhenmodellen (DEM), die aus öffentlichen Daten oder Maschinen-Telemetrie stammen. Als Raster gerendert, um topografische Merkmale wie Höhenlinien und natürliche Feldunterteilungen zu extrahieren.
Bodenerosionsanalyse
Verwendet die Revidierte Allgemeine Bodenabtragsgleichung (RUSLE), um den Bodenverlust als Funktion von Niederschlag, Bodentyp, Abdeckungspraktiken, Kulturtyp und Gelände zu messen.
LS-Faktor (Hanglängen-Faktor)
Produkt aus Hanglänge und prozentualer Hangneigung, ein Schlüsselparameter zur Bewertung der Wirkung des Geländes auf die Erosion.
Gerade 3D-Spuren
Minimiert das Bodenverlustpotenzial und optimiert die Fahrt bergauf und bergab in Bereichen mit starker Hangneigung.
Gekrümmte 3D-Spuren
Komplexerer Generierungsprozess mit eleganter Handhabung der Kurvenaufteilung und Hangneigungsanalyse, um Gleitkommafehler zu vermeiden.

Plan-Analyse
Umfassende Statistiken und Vergleichswerkzeuge zur Bewertung von Routenoptionen und Auswahl des optimalen Plans.
Zusammenfassende Plan-Statistiken
Liniendiagramme zeigen zusammenfassende Werte über Feldteile hinweg, wenn Felder zerlegt und separat geplant werden.
Direkter Vergleich
Vergleichen Sie zwei Pläne visuell und statistisch, um Kompromisse zu bewerten. Enthält einen einfachen Kostenvergleichsrechner.
- Visuelle Überlagerung verschiedener Routenoptionen
- Statistischer Vergleich aller Kennzahlen
- Kostenanalyse auf Basis von Zeit, Strecke und Überlappung
- Entwurfspläne oder gespeicherte Pläne vergleichen

Exportieren und Speichern
Exportieren Sie Spurpläne in mehreren Formaten, die mit allen großen Maschinenmarken und Lenksystemen kompatibel sind.
Exportformate
OEM-spezifische Formate
- John Deere Operations Center
- CNHi (Case IH, New Holland)
- Trimble
Übertragungsmethoden
- Direkt zum OEM-FMIS (drahtlos zur Maschine)
- Datei für manuellen Import herunterladen
- Automatische Synchronisierung mit verbundenen Maschinen
Generisch
- ISO XML
- KML
- Shapefile
Dateiformate
- Agres
- CNH CN1
- FendtONE
- Hexagon
- Jacto
- JD File
- Precision Planting
- Raven
- Stara
- Topcon
- Trimble
Exportierbare Objekte
Traditionelle Einzellinien-Führung für einfache Systeme
Vollständige Spurwege für erweiterte Führung
Umfangsüberfahrten und Wendebereiche
Außen- und Innengrenzen für die Section Control
Wendungen, Manöver, Vorgewende-Verbinder und Überquerungen
Gespeicherte Pläne ("Grower-Entscheidungen")
Filtern und verwalten Sie gespeicherte Pläne nach Feld, Vorgangstyp und Datum. Führen Sie Aktionen für mehrere Pläne gleichzeitig aus.
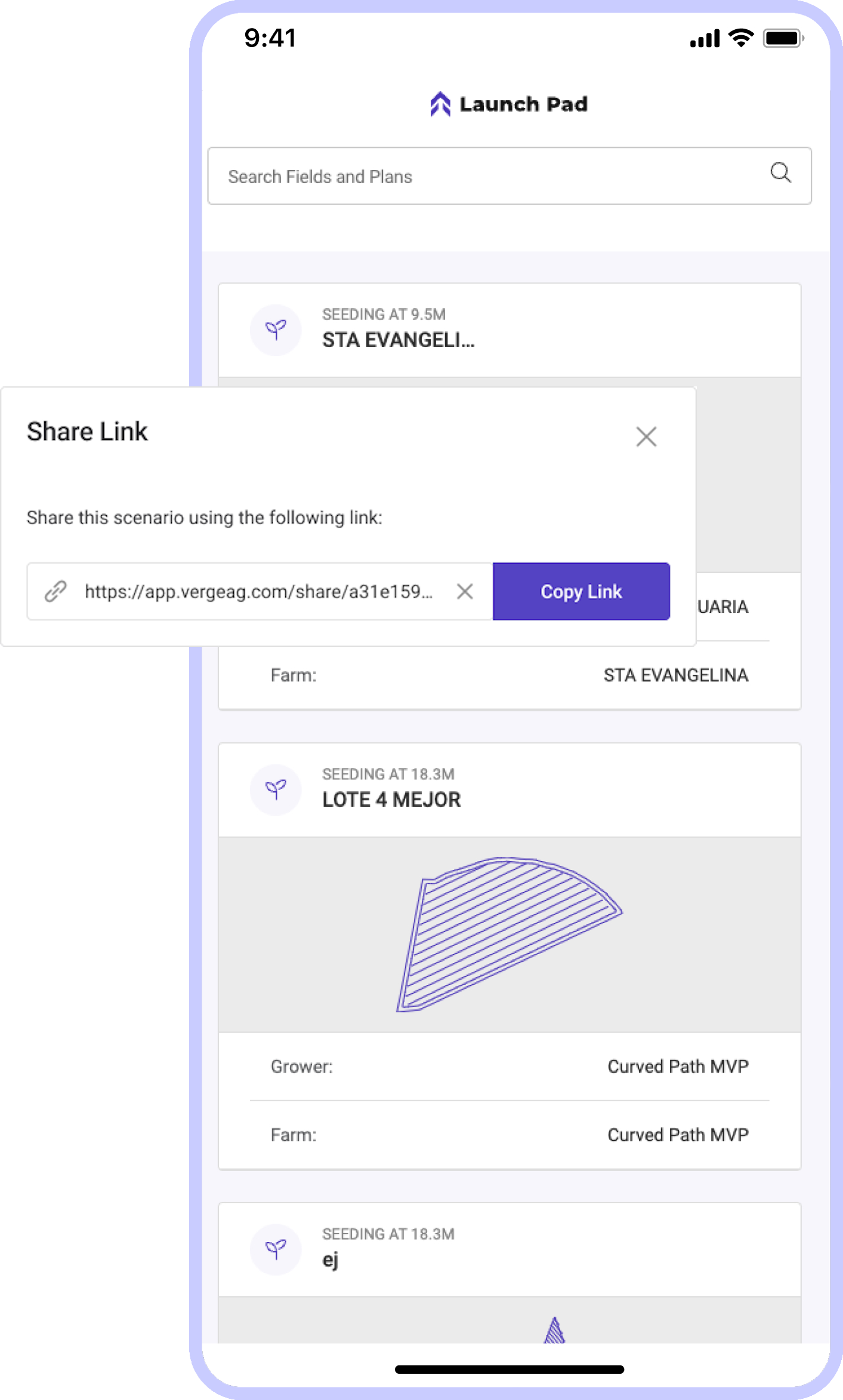
Zusammenarbeit
Teilen Sie Pläne digital mit Fahrern und Teammitgliedern, um Entscheidungen zu validieren und grafische Aufgabenanweisungen bereitzustellen.
Plan-Freigabe
Grundlegende Funktion zur Zusammenarbeit, von Anfang an in das Launch Pad-Ökosystem integriert. Teilen Sie jeden Plan mit Teammitgliedern zur Validierung und für Rückmeldungen.
- Mit Fahrern, Agronomen und Betriebsleitern teilen
- Digitale Kommunikation ersetzt mündliche Anweisungen
- Stellt sicher, dass alle mit demselben Plan arbeiten
Routenbasierte Aufgabenanweisungen
Geteilte Pläne mit Routen werden zu grafischen Aufgabenanweisungen. Während exportierte Pläne die Maschinen steuern, informieren geteilte Pläne auf Smartphones und Tablets die Fahrer darüber, wie die Vorgänge auszuführen sind.
Fahrer können die vollständige Route, die Wendefolge und den operativen Kontext auf Begleitgeräten einsehen, während sie den Plan im Feld ausführen.
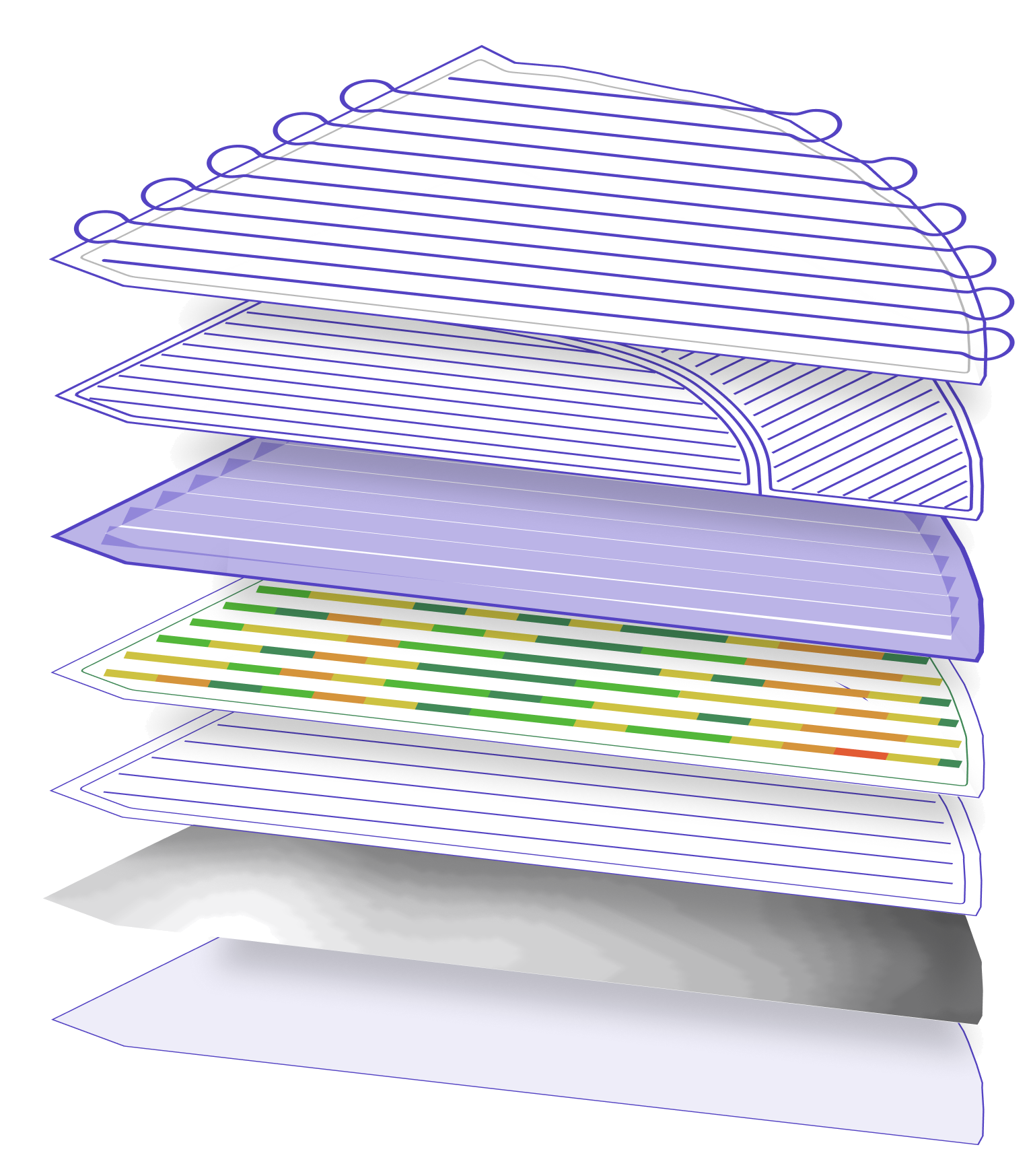
Digitaler Zwilling
Path Planner erstellt umfassende digitale Zwillinge von Feldern, indem geometrische, physikalische und operative Daten in Schichten gelegt werden.
Digitaler Zwilling mit sieben Schichten
-
1Schicht der vollständigen Route
Vollständige durchgängige Maschinentrajektorie mit Wendungen
-
2Spurplan-Schicht
Optimierte Bewegungswege der Maschinen
-
3Abdeckungsschicht
Vollständige Geräteabdeckung mit minimierter Überlappung
-
4Hangneigungsschicht
Hangneigungsoptimierung für Maschinen und Erosionsschutz
-
5Zerlegungsschicht
Teilfeld-Partitionen für operative Effizienz
-
6Topografieschicht
3D-Geländedarstellung mit Höhendaten
-
7Feldgeometrieschicht
Grenzmerkmale und Formanalyse
Aggregation auf Betriebsebene
Einzelne digitale Feldzwillinge werden zu einem umfassenden digitalen Betriebszwilling aggregiert. Dies ermöglicht eine betriebsweite Optimierung der Flächenbewirtschaftung, die Auslegung des Maschinenparks und die operative Planung über alle Felder und Vorgänge hinweg.
Vollständige Routengenerierung
Vollständige durchgängige Routen einschließlich Wege, Wendungen, Sequenzierung und Verbindungen von Start- und Endpunkten, unverzichtbar für autonome Systeme.
Umfassende Routing-Fähigkeiten
Unsere hochmoderne Routing-Lösung unterstützt beliebig komplexe Felder mit ausgefeilter Wende-Modellierung, Vorgewende-Navigation und intelligenter Wegoptimierung.
- Intelligente Wende-Modellierung: Wählt automatisch optimale Wendetypen (Wendekehren, Birnenwenden, P-Wenden) basierend auf Feldgeometrie und Maschineneigenschaften.
- Erweiterte Vorgewende-Navigation: Ermöglicht ein effizientes Durchqueren zwischen Feldbereichen mit konfigurierbaren Optionen für Vorgewende-zuerst- oder Vorgewende-zuletzt-Muster, Bevorzugung des äußersten Vorgewendes und vollständige Vorgewende-Überquerungen um komplexe Hindernisse.
- Proprietärer Routing-Algorithmus: Berechnet die Abstände zwischen allen Spurpaaren, um einen optimierten Weg zu erstellen, der die nicht-arbeitende Strecke minimiert und dabei unregelmäßige Felder, Ausschlusszonen und mehrere Hindernisse handhabt.
- Kapazitätsbasiertes Routing: Planen Sie Nachfüllpunkte und optimieren Sie Routen basierend auf Fahrzeugkapazität und Durchflussrate. Arbeitsabläufe mit einem einzelnen Fahrzeug unterstützen exakte Nachfüllpunkte, die Positionierung am Spuranfang oder die Platzierung am nächstgelegenen äußeren Vorgewende. Das Routing zu Sammelbereichen für mehrere Fahrzeuge (CVRP) optimiert den Flottenbetrieb, wobei Fahrzeuge zu Sammeldepots zurückkehren, sobald die Kapazität erreicht ist.
- Zusätzliche Fähigkeiten: Experimentelle Funktionen wie lenkbare Glättung und Unterstützung gezogener Geräte, dazu umfangreiche Konfigurationsoptionen, die zu Ihren betrieblichen Vorlieben passen.
Sehen Sie es in Aktion
Entdecken Sie detaillierte Beispiele, visuelle Demonstrationen und ausführliche Erklärungen aller Routing-Fähigkeiten
Entdecken Sie die komplette Routing-Übersicht