Функції Path Planner
Межі Поля
Фіксуйте та перевіряйте межі поля з кількох джерел із автоматичною попередньою обробкою для оптимального планування проходів.
Методи Імпорту

Підключена система FMIS OEM
Імпортуйте безпосередньо з John Deere, CNHi та інших провідних платформ сільгосптехніки.
Імпорт Shapefile/ISO
Завантажуйте стандартні GIS-шейпфайли з будь-якої системи управління сільським господарством.
Ручне Малювання
Малюйте межі безпосередньо на супутникових знімках за допомогою інструментів точного побудови.
Вибір за Супутниковими Знімками
Вибирайте з попередньо оброблених глобальних супутникових знімків за лічені секунди.
Автоматична Попередня Обробка
- Перевірка: Забезпечує геометричну цілісність і видаляє некоректні дані
- Спрощення: Усуває шуми та зайві точки для прискореної обробки
- Згладжування: Оптимізує криві меж для реалістичних маршрутів техніки
- Зони Виключення: Задайте прохідні та непрохідні перешкоди (водотоки, опори, природоохоронні зони)
Декомпозиція Поля
Розбивайте складні поля на оптимізовані підполя для підвищення ефективності, скорочення розворотів і мінімізації ерозії ґрунту.
Ручна Декомпозиція
- Додавайте точки та проводьте через них лінії
- Вільне малювання розподільних ліній
- Імпорт зовнішніх опорних ліній із сторонніх застосунків
- Автоматичне розбиття перешкод між підполями
Автоматична Декомпозиція
- За прямими лініями: Створює опуклі підполя для скорочення розворотів
- За кривими: Використовує горизонталі для терасованих полів
- Фірмовий алгоритм визначає оптимальні точки поділу
- Максимізує охоплення, мінімізуючи втрати ґрунту


Управління Розворотними Смугами
Формуйте оптимізовані проходи розворотної смуги з адаптивним згладжуванням для будь-якого радіусу повороту та регіональних практик.
Типи Розворотних Смуг
Проходи по Повному Периметру
Один або кілька повних кіл навколо меж поля та зон виключення.
Лише Розворотні Смуги
Покриття лише там, де техніка фактично розвертається, що скорочує зайві проходи.
Без Розворотних Смуг
Для полів із доступними дорогами або проїздами для розвороту за межами поля.
Розширені Можливості
- Закруглення Кутів: Прямі або закруглені кути під будь-який радіус повороту
- Спрощення Точок: Усуває шуми для більш чистих і керованих маршрутів
- Адаптивні Криві: Забезпечує польове виконання із системами навігації
- Регіональне Налаштування: Адаптується до місцевих агрономічних практик

Розворотна Смуга

Без Розворотних Смуг
Аналіз Меж
Машинне навчання та комп'ютерний зір вилучають ключові характеристики з меж для інтелектуального планування проходів.
Прямі Краї
МН виявляє майже прямі ділянки меж для вирівнювання та спрощення.
Опорні Криві
Обчислювальна геометрія вилучає протяжні криволінійні сегменти для планування криволінійних гонів.
Висотні Межі
Визначає кластерні контури за даними ЦМР — природні топографічні межі, що перевершують одноуровневі горизонталі.
Цифрова Модель Рельєфу (ЦМР)
Будує 3D-моделі рельєфу з відкритих джерел даних або телеметрії техніки. Вилучає топографічні особливості — горизонталі та природні поділи поля, необхідні для планування з урахуванням ухилів і мінімізації ерозії ґрунту.

Планування Прямих Гонів
Основні алгоритми планування проходів генерують паралельні прямі гони, оптимізовані за охопленням, ефективністю та множиною цільових критеріїв.
Цілі Оптимізації
Основні Цілі
- Максимізувати площу операційного охоплення
- Мінімізувати перекриття (подвійний прохід)
- Враховувати прохідні та непрохідні перешкоди
Додаткова Оптимізація
- Мінімізувати кількість розворотів
- Скоротити загальний час і відстань
- Мінімізувати клинові ряди (перекриття розворотної смуги)
- Знизити потенціал втрати ґрунту
Вирівнювання і Поворот
- Вирівнювання за будь-яким напрямком (0–179° або довільний десятковий)
- Автоматичне зміщення для ідеального вирівнювання країв
- Поворот плану зі збереженням оптимального охоплення
Розширені Шаблони
- Вгаданий Ряд (Guess Row): Автоматичне підлаштування кроку для скорочення неповних проходів
- Віяло (Fanning): Поступова зміна напрямку між паралельними краями

Планування Криволінійних Гонів
Фірмові алгоритми генерують криволінійні гони для нерегулярних меж і складного рельєфу — значно складніше, ніж планування прямих маршрутів.

Обробка Опорної Кривої
Криволінійні гони генеруються шляхом зміщення опорних кривих (криві меж, горизонталі або кластерні контури). Попередня обробка гарантує придатність кривих для планування проходів:
- Усуває петляючі, стиснуті й самоперетинні сегменти
- Забезпечує керованість для реальної техніки
- Перевіряє геометричну здійсненність
Ортогональна Проєкція
Проєктує опорні криві в одному або обох напрямках на ширину гону до повного покриття поля. Підтримує перпендикулярну відстань, рівну ширині гону, для повного охоплення.
- Послаблює ортогональність при стисненні гонів для збереження керованості
- Застосовує згладжування до кожного гону перед генерацією наступного
- Управляє щільністю вершин для запобігання надмірно складних маршрутів
Подвійна Опорна Крива
Для терасованих полів узгоджує дві опорні криві, починаючи з ортогональної проєкції першої кривої та поступово адаптуючись до форми другої кривої. Найкращий результат досягається при незначній відмінності кривих.
3D-планування Рельєфу
Унікальна можливість планування у трьох вимірах із оцінкою потенціалу ерозії ґрунту та оптимізацією маршрутів для змінних висот.
3D-моделювання Рельєфу
Будує 3D-моделі полів із Цифрових Моделей Рельєфу (ЦМР), отриманих із відкритих даних або телеметрії техніки. Відображається у вигляді растрів для вилучення топографічних особливостей — горизонталей і природних поділів поля.
Аналіз Ерозії Ґрунту
Застосовує Переглянуте універсальне рівняння втрат ґрунту (RUSLE) для розрахунку змиву ґрунту залежно від опадів, типу ґрунту, агротехнічних прийомів, культури і рельєфу.
Фактор LS (Фактор Довжини і Крутизни Схилу)
Добуток довжини схилу та відсоткового ухилу — ключовий параметр оцінки впливу рельєфу на ерозію.
3D Прямі Гони
Мінімізує потенціал втрати ґрунту та оптимізує рух вгору і вниз по схилу в зонах із високим ухилом.
3D Криволінійні Гони
Складніший процес генерації з елегантною обробкою розбиття кривих і аналізу ухилів для виключення помилок із рухомою крапкою.

Аналітика Планів
Вичерпна статистика та інструменти порівняння для оцінки варіантів маршруту і вибору оптимального плану.
Зведена Статистика Плану
Лінійні графіки відображають зведені значення за частинами поля при декомпозиції та роздільному плануванні.
Порівняння Поруч
Порівнюйте два плани візуально та статистично для оцінки компромісів. Включає простий калькулятор порівняння витрат.
- Візуальне накладення різних варіантів маршруту
- Статистичне порівняння всіх показників
- Аналіз витрат на основі часу, відстані та перекриттів
- Порівняння чорнових або збережених планів

Експорт і Збереження
Експортуйте плани проходів у кількох форматах, сумісних із усіма провідними марками сільгосптехніки та навігаційними системами.
Формати Експорту
Формати OEM-виробників
- John Deere Operations Center
- CNHi (Case IH, New Holland)
- Trimble
Способи Доставки
- Безпосередньо в OEM FMIS (бездротово на техніку)
- Завантаження файлу для ручного імпорту
- Автоматична синхронізація з підключеними машинами
Універсальні
- ISO XML
- KML
- Shapefile
Формати Файлів
- Agres
- CNH CN1
- FendtONE
- Hexagon
- Jacto
- JD File
- Precision Planting
- Raven
- Stara
- Topcon
- Trimble
Експортовані Об'єкти
Традиційна однолінійна навігація для базових систем
Повні траєкторії гонів для розширеної навігації
Проходи по периметру та розворотні зони
Зовнішні та внутрішні межі для секційного контролю
Повороти, Маневри, З'єднувачі розворотних смуг і Переїзди
Збережені Плани ("Рішення Фермера")
Фільтруйте та керуйте збереженими планами за полем, типом операції і датою. Застосовуйте дії до кількох планів одночасно.
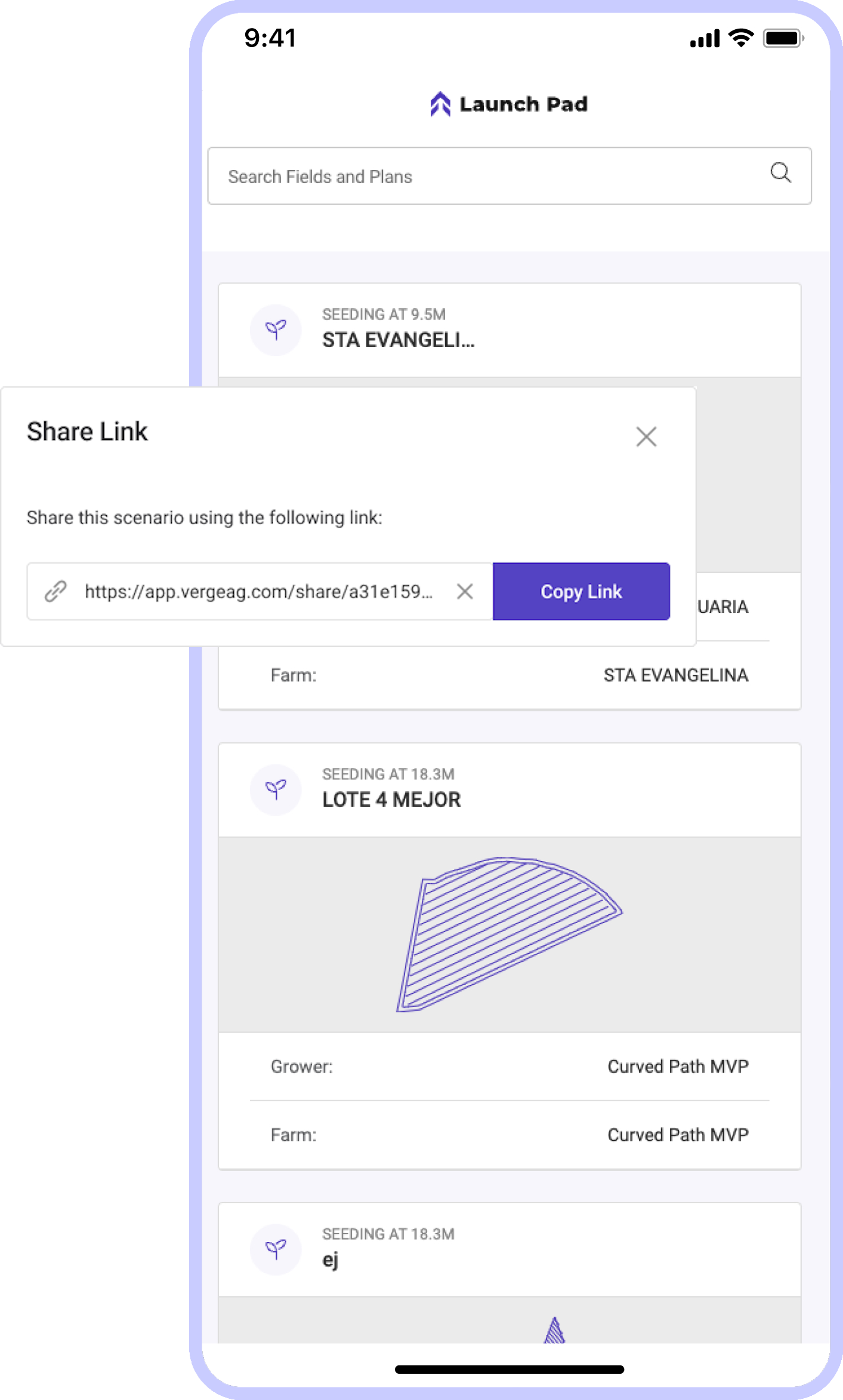
Співпраця
Діліться планами в цифровому вигляді з операторами та членами команди для перевірки рішень і надання графічних інструкцій щодо завдань.
Обмін Планами
Основоположна функція співпраці, вбудована в екосистему Launch Pad з першого дня. Діліться будь-яким планом із членами команди для перевірки та зворотного зв'язку.
- Діліться з операторами, агрономами та керівниками господарства
- Цифрове спілкування замінює усні інструкції
- Гарантує роботу всіх за єдиним планом
Інструкції щодо Завдання на Основі Маршруту
Спільні плани з маршрутами стають графічними інструкціями щодо завдання. Експортовані плани керують технікою, а спільні плани на телефонах і планшетах інформують операторів про порядок виконання робіт.
Оператори можуть переглядати повний маршрут, послідовність розворотів і операційний контекст на допоміжних пристроях під час виконання плану в полі.
Цифровий Двійник
Path Planner створює комплексні цифрові двійники полів, об'єднуючи геометричні, фізичні та операційні дані.
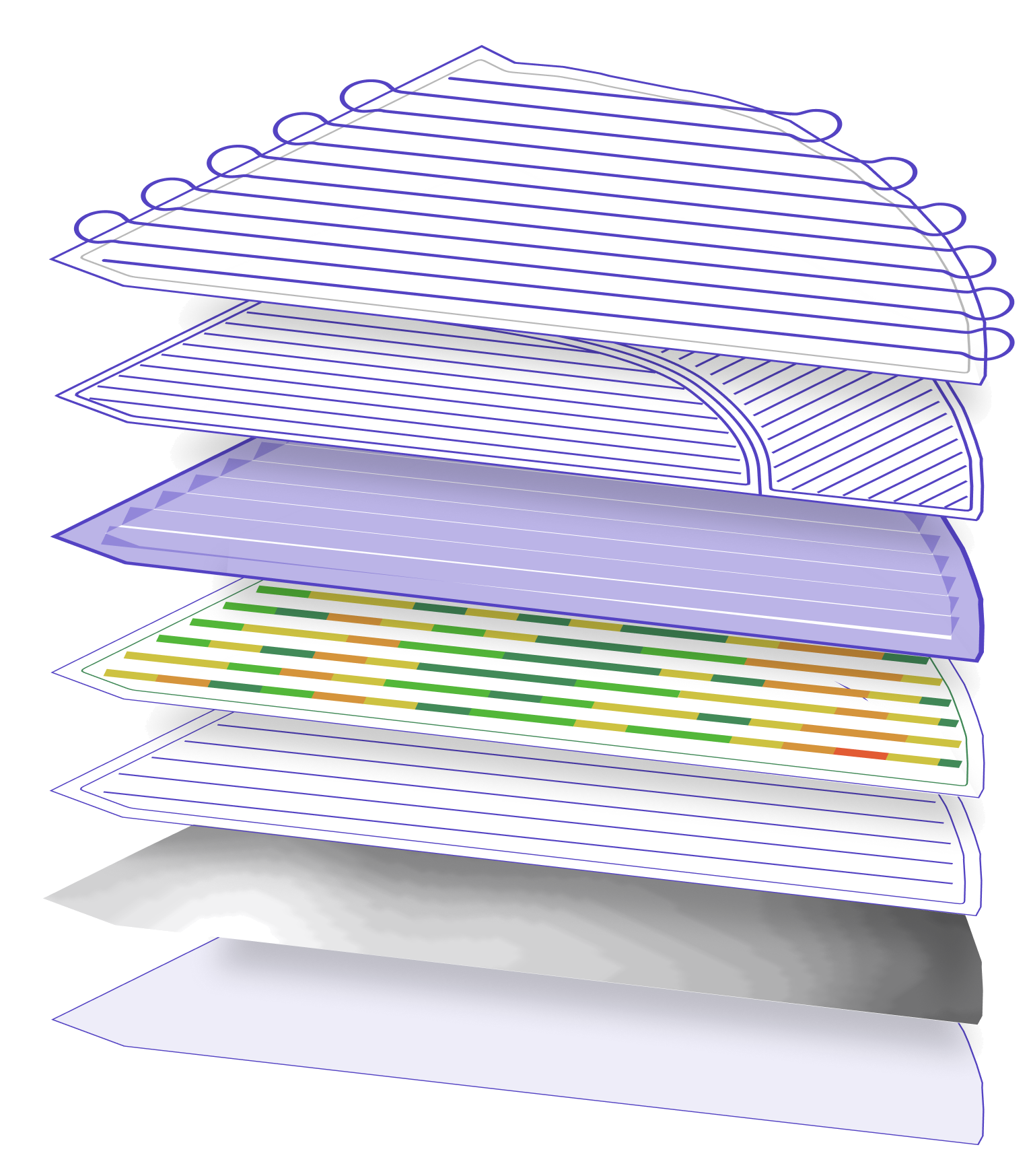
Семишаровий Цифровий Двійник
-
1Шар Повного Маршруту
Повна траєкторія руху техніки від початку до кінця з розворотами
-
2Шар Плану Проходів
Оптимізовані траєкторії руху техніки
-
3Шар Охоплення
Повне охоплення знаряддям із мінімізованим перекриттям
-
4Шар Ухилів
Оптимізація ухилів для техніки та контролю ерозії
-
5Шар Декомпозиції
Поділи підполів для операційної ефективності
-
6Шар Топографії
3D-представлення рельєфу з даними висот
-
7Шар Геометрії Поля
Характеристики меж і аналіз форми
Агрегація на Рівні Господарства
Цифрові двійники окремих полів об'єднуються у комплексний цифровий двійник усього господарства. Це дозволяє оптимізувати управління угіддями, проєктувати парк техніки та планувати операції по всіх полях і роботах.
Повна Генерація Маршруту
Повні маршрути від початку до кінця, включаючи траєкторії, повороти, послідовність і з'єднання точок старту/фінішу, необхідні для автономних систем.
Комплексні Можливості Маршрутизації
Наше передове рішення маршрутизації підтримує довільно складні поля з вишуканим моделюванням розворотів, навігацією по розворотних смугах та інтелектуальною оптимізацією траєкторії.
- Інтелектуальне Моделювання Розворотів: Автоматично вибирає оптимальні типи розвороту (U-подібні, об'ємні, P-подібні) з урахуванням геометрії поля та характеристик техніки.
- Розширена Навігація по Розворотних Смугах: Забезпечує ефективний перехід між зонами поля з налаштовуваними параметрами: спочатку розворотна смуга або наприкінці, перевага крайній зовнішній смузі та повні обходи по розворотній смузі навколо складних перешкод.
- Фірмовий Алгоритм Маршрутизації: Розраховує відстані між усіма парами гонів для побудови оптимізованого маршруту, що мінімізує непродуктивний пробіг при роботі з нерегулярними полями, зонами виключення та множиною перешкод.
- Маршрутизація за Вантажопідйомністю: Плануйте точки дозаправки та оптимізуйте маршрути з урахуванням місткості та витрати. Робочі процеси для однієї одиниці техніки підтримують точні точки заправки, позиціонування на початку гону або у найближчій зовнішній розворотній смузі. Маршрутизація з майданчиком для кількох одиниць техніки (CVRP) оптимізує роботу парку з поверненням на накопичувальні майданчики при вичерпанні місткості.
- Додаткові Можливості: Експериментальні функції, такі як кероване згладжування та підтримка причіпних знарядь, а також розширені параметри налаштування під ваші операційні уподобання.
Дивитися в Дії
Вивчайте детальні приклади, візуальні демонстрації та вичерпні пояснення всіх можливостей маршрутизації
Відкрити Повний Демонстраційний Розділ Маршрутизації