Fonctionnalités de Path Planner
Limites de Parcelle
Capturez et validez les limites de parcelle depuis plusieurs sources avec un prétraitement automatique pour une planification de trajectoires optimale.
Méthodes d'Importation

FMIS OEM Connecté
Importez directement depuis John Deere, CNHi et d'autres grandes plateformes d'équipements.
Importation Shapefile/ISO
Téléchargez des shapefiles GIS standards depuis n'importe quel système de gestion agricole.
Dessin Manuel
Dessinez des limites directement sur des images satellites avec des outils de précision.
Sélection par Satellite
Sélectionnez parmi des images satellites mondiales prétraitées en quelques secondes.
Prétraitement Automatique
- Validation : Garantit l'intégrité géométrique et supprime les données invalides
- Simplification : Élimine le bruit et les points redondants pour un traitement plus rapide
- Lissage : Optimise les courbes de limite pour des trajectoires machines réalistes
- Zones d'Exclusion : Définissez les obstacles franchissables et non franchissables (cours d'eau, poteaux, zones naturelles)
Décomposition de Parcelle
Divisez les parcelles complexes en sous-parcelles optimisées pour améliorer l'efficacité, réduire les virages et minimiser la perte de sol.
Décomposition Manuelle
- Ajoutez des points et tracez des lignes les reliant
- Tracez librement des lignes de découpage
- Importez des lignes de référence externes depuis des applications tierces
- Découpage automatique des obstacles entre les sous-parcelles
Décomposition Automatique
- En ligne droite : Crée des sous-parcelles convexes pour réduire les virages
- Basée sur les courbes : Utilise les courbes de niveau pour les parcelles en terrasses
- L'algorithme propriétaire identifie les points de partition optimaux
- Maximise la couverture tout en minimisant la perte de sol


Gestion des Tournières
Générez des passes de tournière optimisées avec un lissage adaptatif pour tout rayon de virage et toute pratique régionale.
Types de Tournière
Passes de Périmètre Complet
Un ou plusieurs tours complets autour des limites de parcelle et des zones d'exclusion.
Tournières Uniquement aux Virages
Couverture uniquement là où les machines effectuent réellement leurs virages, réduisant les passes inutiles.
Zéro Tournière
Pour les parcelles avec des routes ou chemins accessibles permettant de virer hors de la limite.
Fonctionnalités Avancées
- Lissage des Coins : Coins carrés ou arrondis pour s'adapter à tout rayon de virage
- Simplification des Points : Supprime le bruit pour des trajectoires plus propres et plus directrices
- Courbes Adaptatives : Permet l'exécution en champ avec les systèmes de guidage
- Personnalisation Régionale : S'adapte aux pratiques agricoles locales

Tournière

Zéro Tournière
Analyse des Limites
L'apprentissage automatique et la vision par ordinateur extraient les caractéristiques critiques des limites pour une planification intelligente des trajectoires.
Bords Droits
L'apprentissage automatique identifie les segments de limite quasi-droits pour l'alignement et la simplification.
Courbes de Référence
La géométrie computationnelle extrait de longs segments courbes adaptés à la planification de pistes courbes.
Limites par Élévation
Détecte les contours de cluster à partir des données MNT, limites topographiques naturelles supérieures aux lignes d'élévation unique.
Modèle Numérique de Terrain (MNT)
Construit des modèles de terrain 3D à partir de sources de données publiques ou de la télémétrie des équipements. Extrait les caractéristiques topographiques comme les courbes de niveau et les divisions naturelles de parcelle, essentielles pour la planification tenant compte des pentes et la minimisation de l'érosion des sols.

Planification des Pistes Droites
Les algorithmes de planification de trajectoires génèrent des pistes droites parallèles optimisées pour la couverture, l'efficacité et des objectifs multiples.
Objectifs d'Optimisation
Objectifs Principaux
- Maximiser la superficie de couverture opérationnelle
- Minimiser le chevauchement (double couverture)
- Gérer les obstacles franchissables et non franchissables
Optimisation Secondaire
- Minimiser le nombre de virages
- Réduire le temps total et la distance
- Minimiser les pistes en pointe (chevauchement de tournière)
- Réduire le potentiel de perte de sol
Alignement et Rotation
- Alignez selon n'importe quelle orientation (0-179° ou décimal personnalisé)
- Translation automatique pour un alignement parfait des bords
- Faites pivoter les plans en maintenant une couverture optimale
Motifs Avancés
- Ligne Estimée (Guess Row) : Ajustement automatique de l'espacement pour réduire les passes partielles
- Éventail (Fanning) : Changement progressif de direction entre des bords parallèles

Planification des Pistes Courbes
Des algorithmes propriétaires génèrent des pistes courbes pour les limites irrégulières et les terrains accidentés, beaucoup plus complexe que la planification en lignes droites.

Traitement de la Courbe de Référence
Les pistes courbes sont générées par décalage de courbes de référence (courbes de limite, courbes de niveau ou contours de cluster). Le prétraitement garantit que les courbes conviennent à la planification de trajectoires :
- Supprime les segments sinueux, pincés et auto-intersectants
- Garantit la directivité pour les équipements réels
- Valide la faisabilité géométrique
Projection Orthogonale
Projette les courbes de référence dans une ou deux directions selon la largeur de piste jusqu'à couvrir la parcelle. Maintient une distance perpendiculaire égale à la largeur de piste pour une couverture complète.
- Assouplit l'orthogonalité quand les pistes se pincent pour maintenir la directivité
- Applique un lissage à chaque piste avant de générer la suivante
- Gère la densité des sommets pour éviter des trajectoires trop complexes
Double Courbe de Référence
Pour les parcelles en terrasses, réconcilie deux courbes de référence en débutant par la projection orthogonale de la première courbe puis en s'adaptant progressivement à la forme de la seconde courbe. Fonctionne mieux quand les courbes sont légèrement différentes.
Planification 3D du Terrain
Capacité unique de planifier en trois dimensions, évaluant le potentiel d'érosion des sols et optimisant les itinéraires pour des élévations variables.
Modélisation du Terrain 3D
Construit des modèles de parcelle 3D à partir de Modèles Numériques de Terrain (MNT) issus de données publiques ou de la télémétrie des équipements. Rendus sous forme de rasters pour extraire les caractéristiques topographiques comme les courbes de niveau et les divisions naturelles de parcelle.
Analyse de l'Érosion des Sols
Utilise l'Équation Universelle Révisée des Pertes en Sol (RUSLE) pour mesurer la perte de sol en fonction des précipitations, du type de sol, des pratiques culturales, du type de culture et du terrain.
Facteur LS (Facteur Longueur-Pente)
Produit de la longueur de pente et du pourcentage de pente, paramètre clé pour évaluer l'effet du terrain sur l'érosion.
Pistes Droites 3D
Minimise le potentiel de perte de sol et optimise les trajets en montée et en descente dans les zones à forte pente.
Pistes Courbes 3D
Processus de génération plus complexe avec une gestion élégante du découpage des courbes et de l'analyse de pente pour éviter les erreurs en virgule flottante.

Analyse des Plans
Statistiques complètes et outils de comparaison pour évaluer les options d'itinéraire et sélectionner le plan optimal.
Statistiques Récapitulatives du Plan
Les graphiques linéaires affichent les valeurs récapitulatives entre les parties de parcelle lorsque les parcelles sont décomposées et planifiées séparément.
Comparaison Côte à Côte
Comparez deux plans visuellement et statistiquement pour évaluer les compromis. Comprend une calculatrice simple de comparaison des coûts.
- Superposition visuelle de différentes options d'itinéraire
- Comparaison statistique de toutes les métriques
- Analyse des coûts basée sur le temps, la distance et le chevauchement
- Comparez des plans brouillons ou des plans enregistrés

Exporter et Enregistrer
Exportez les Plans de Passages dans de multiples formats compatibles avec toutes les grandes marques d'équipements et systèmes de guidage.
Formats d'Exportation
Formats Spécifiques OEM
- John Deere Operations Center
- CNHi (Case IH, New Holland)
- Trimble
Méthodes de Livraison
- Direct vers le FMIS OEM (sans fil vers l'équipement)
- Téléchargement de fichier pour importation manuelle
- Synchronisation automatique avec les machines connectées
Générique
- ISO XML
- KML
- Shapefile
Formats de Fichier
- Agres
- CNH CN1
- FendtONE
- Hexagon
- Jacto
- JD File
- Precision Planting
- Raven
- Stara
- Topcon
- Trimble
Objets Exportables
Guidage traditionnel à ligne unique pour les systèmes de base
Trajectoires complètes de piste pour le guidage avancé
Passes de périmètre et zones de virage
Limites extérieures et intérieures pour le contrôle des sections
Virages, Manœuvres, Connecteurs de tournière et Traversées
Plans Enregistrés ("Décisions de l'Agriculteur")
Filtrez et gérez les plans enregistrés par parcelle, type d'opération et date. Agissez sur plusieurs plans simultanément.
Collaboration
Partagez les plans numériquement avec les opérateurs et les membres de l'équipe pour valider les décisions et fournir des instructions graphiques de tâches.
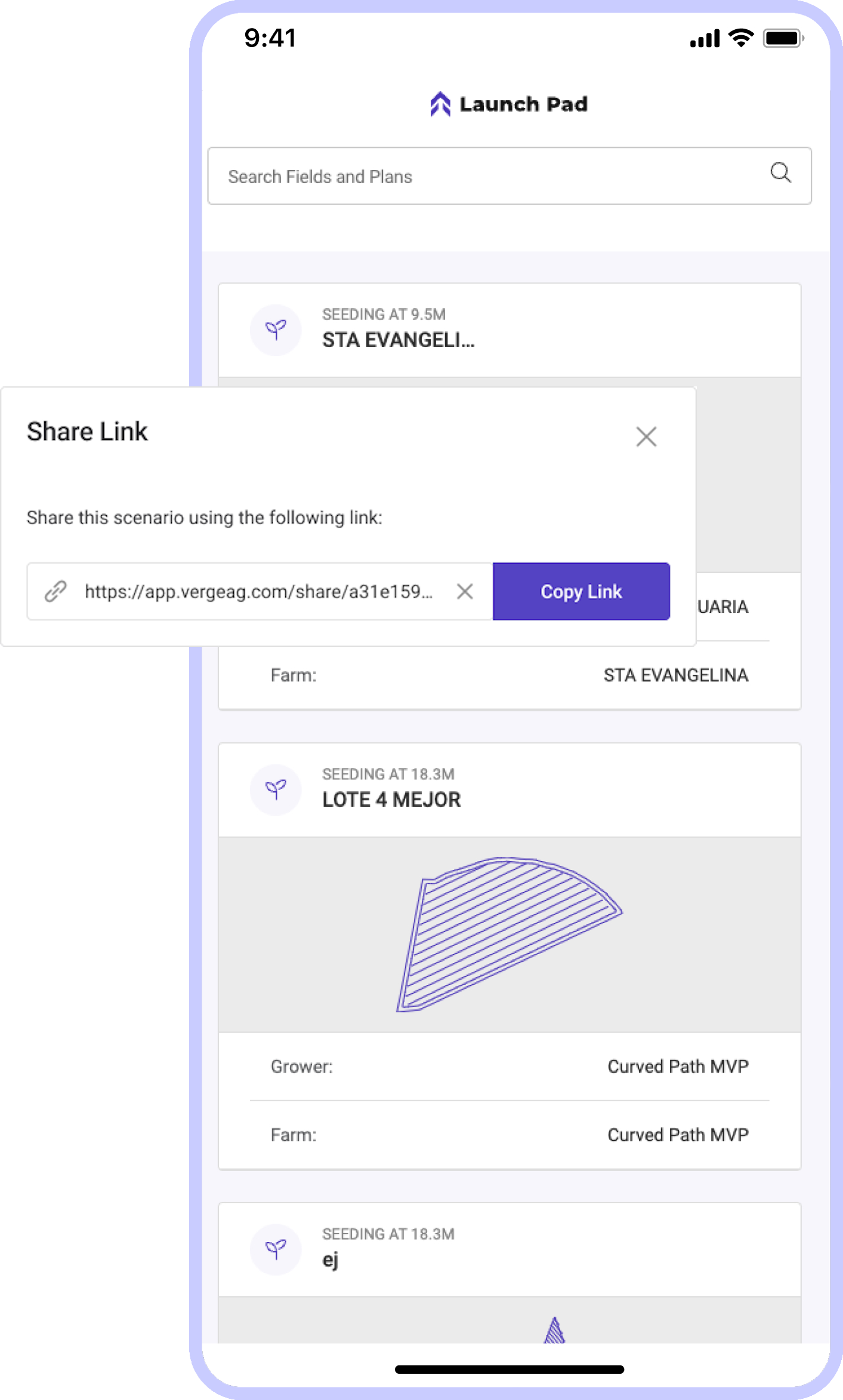
Partage de Plans
Fonctionnalité de collaboration fondamentale intégrée à l'écosystème Launch Pad dès le premier jour. Partagez n'importe quel plan avec les membres de l'équipe pour validation et retours.
- Partagez avec les opérateurs, agronomes et gestionnaires agricoles
- La communication numérique remplace les instructions verbales
- Garantit que tout le monde travaille à partir du même plan
Instructions de Tâche Basées sur l'Itinéraire
Les plans partagés avec des itinéraires deviennent des instructions graphiques de tâches. Tandis que les plans exportés guident les équipements, les plans partagés sur téléphones et tablettes informent les opérateurs sur la façon d'accomplir les opérations.
Les opérateurs peuvent visualiser l'itinéraire complet, la séquence des virages et le contexte opérationnel sur des appareils complémentaires pendant l'exécution du plan en champ.
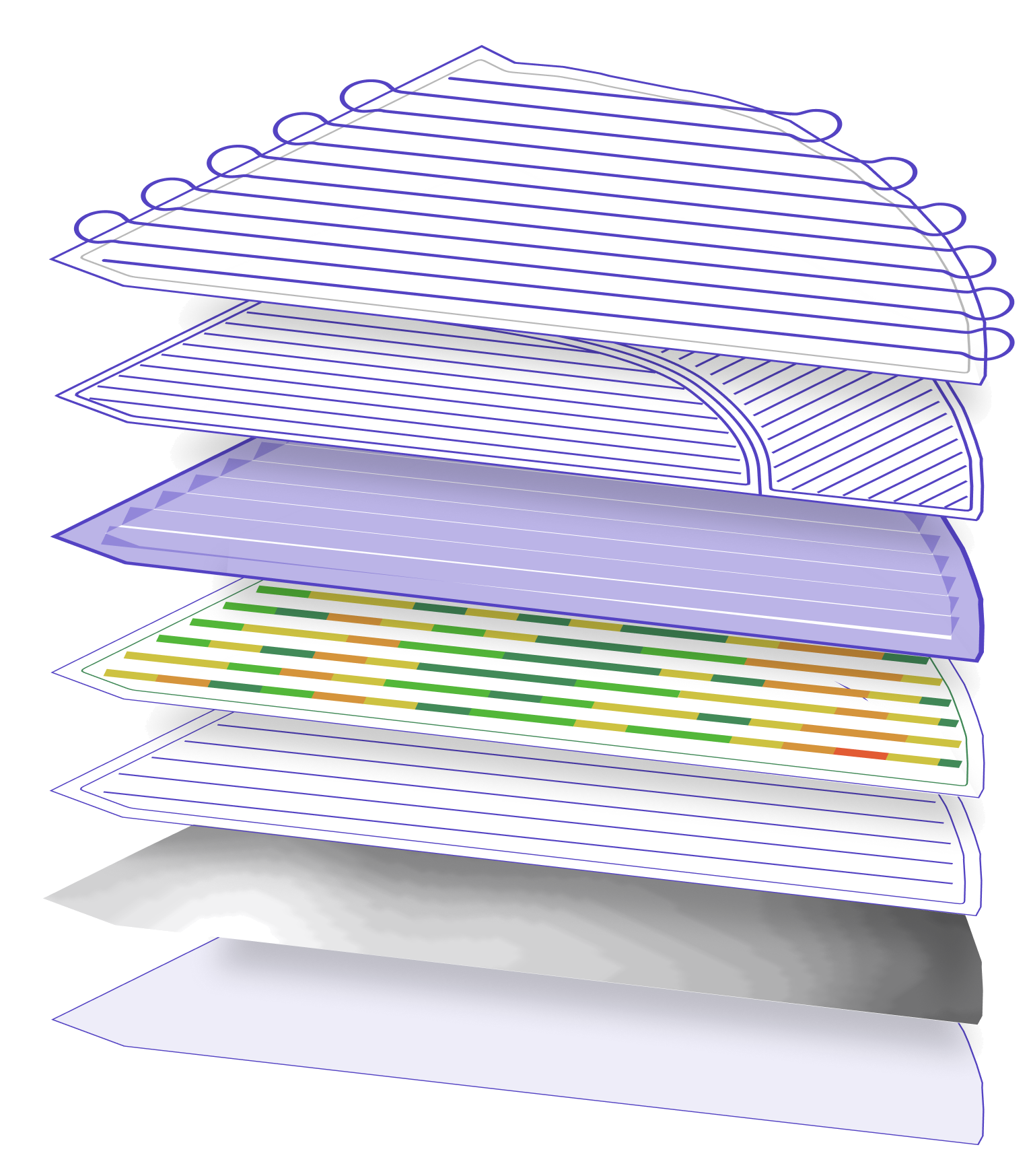
Jumeau Numérique
Path Planner crée des jumeaux numériques complets des parcelles en superposant des données géométriques, physiques et opérationnelles.
Jumeau Numérique à Sept Couches
-
1Couche Itinéraire Complet
Trajectoire machine complète de bout en bout avec virages
-
2Couche Plan de Passages
Trajectoires de déplacement des équipements optimisées
-
3Couche de Couverture
Couverture complète des outils avec chevauchement minimisé
-
4Couche de Pente
Optimisation des pentes pour les équipements et le contrôle de l'érosion
-
5Couche de Décomposition
Partitions de sous-parcelles pour l'efficacité opérationnelle
-
6Couche Topographique
Représentation 3D du terrain avec données d'élévation
-
7Couche Géométrie de Parcelle
Caractéristiques des limites et analyse de la forme
Agrégation au Niveau de l'Exploitation
Les jumeaux numériques de parcelles individuelles s'agrègent en un jumeau numérique complet de l'exploitation. Cela permet l'optimisation de la gestion des terres à l'échelle de l'exploitation, la conception de la flotte d'équipements et la planification opérationnelle sur l'ensemble des parcelles et des opérations.
Génération d'Itinéraire Complet
Itinéraires complets de bout en bout incluant les trajectoires, les virages, le séquençage et les connexions de points de départ/arrivée, essentiels pour les systèmes autonomes.
Capacités de Routage Complètes
Notre solution de routage de pointe prend en charge des parcelles arbitrairement complexes avec une modélisation sophistiquée des virages, une navigation de tournière et une optimisation intelligente des trajectoires.
- Modélisation Intelligente des Virages : Sélectionne automatiquement les types de virage optimaux (demi-tours, virages en bulbe, virages en P) en fonction de la géométrie de la parcelle et des caractéristiques des équipements.
- Navigation Avancée en Tournière : Permet un transit efficace entre les zones de parcelle avec des options configurables pour des motifs tournière en premier ou tournière en dernier, préférence pour la tournière la plus externe, et traversées complètes de tournière autour d'obstacles complexes.
- Algorithme de Routage Propriétaire : Calcule les distances entre toutes les paires de pistes pour créer un itinéraire optimisé qui minimise la distance non travaillée tout en gérant des parcelles irrégulières, des zones d'exclusion et de multiples obstacles.
- Routage par Capacité : Planifiez les points de remplissage et optimisez les itinéraires en fonction de la capacité et du débit du véhicule. Les flux de travail à véhicule unique prennent en charge des points de remplissage exacts, un positionnement en début de piste ou le placement sur la tournière extérieure la plus proche. Le routage en zone de transit pour plusieurs véhicules (CVRP) optimise les opérations de flotte avec les véhicules qui retournent aux dépôts de transit lorsque leur capacité est atteinte.
- Capacités Supplémentaires : Fonctionnalités expérimentales comme le lissage directif et la prise en charge des outils tractés, plus de nombreuses options de configuration pour correspondre à vos préférences opérationnelles.
Voir en Action
Explorez des exemples détaillés, des démonstrations visuelles et des explications approfondies de toutes les capacités de routage
Explorer la Vitrine Complète de Routage