
Planificación CTF en 133 parcelas, Australia
Por Kate Witham, Farmanco
GRDC Grain Automate Project · Diciembre de 2025


Mensajes Clave
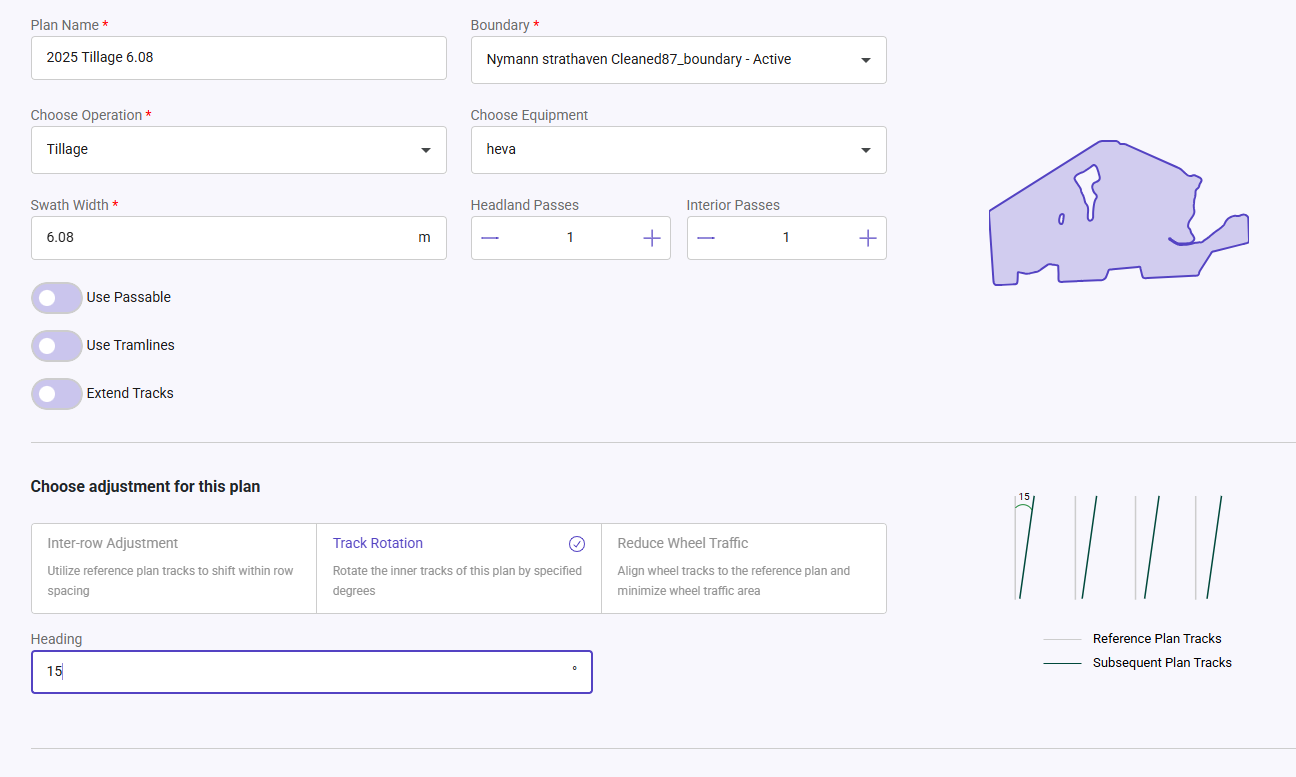
- Planificación optimizada para parcelas nuevas: Launch Pad de Verge Ag generó líneas de guía GPS y rediseñó los trazados para la Agricultura de Tráfico Controlado (CTF), incluyendo la incorporación de desfases de subsolado profundo a 15 grados.
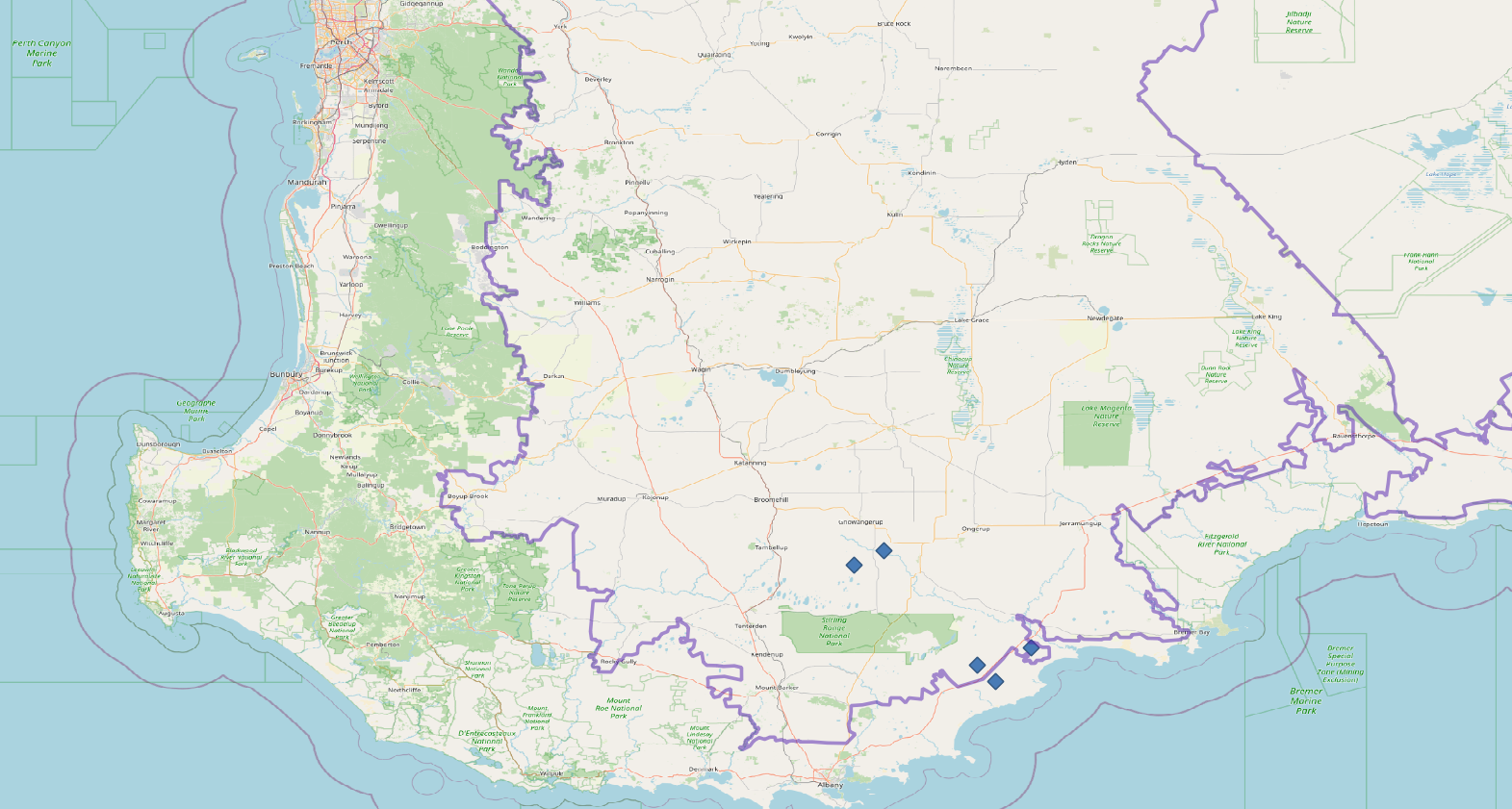
- Consistencia entre fincas: En 133 parcelas repartidas por cinco ubicaciones en la Gran Región del Sur de Australia Occidental, Launch Pad estandarizó las líneas CTF con alineación de bordes y rumbos optimizados. La plataforma se adaptó a trazados de parcelas variados, dos sistemas de guía y cuatro anchos de maquinaria.
- Visión de autonomía: Launch Pad entrega muchas de las eficiencias asociadas con equipos autónomos, incluida la planificación completa de rutas y la ejecución estandarizada, utilizando los sistemas de piloto automático y guía existentes. Esto reduce la dependencia de costosos desbloqueos de autonomía OEM o la inversión de capital en nueva maquinaria autónoma.
Antecedentes
Launch Pad, developed by Verge Ag, is a web-based precision agriculture platform that turns a grower's existing machinery and guidance systems into supervised autonomy. It generates custom GPS-compatible routes based on paddock boundaries, equipment specifications, and operational goals, planning the most effective way for equipment to move across a field. This reduces costly in-cab decisions and improves overall productivity while cutting fuel use, working time, and environmental impact. When combined with autosteer and high-accuracy guidance, operators focus on monitoring rather than steering.
Otra aplicación de Verge Launch Pad es crear y utilizar líneas de recorrido comunes para la Agricultura de Tráfico Controlado (CTF). El CTF es un sistema que incorpora huellas permanentes utilizadas por la maquinaria en todas las operaciones (cuando es posible) durante la temporada. En los sistemas CTF, se establece una línea de recorrido maestra como punto de partida en la parcela, y todas las operaciones posteriores se basan en esta línea. Al hacer coincidir el ancho operativo y el espaciado de huellas de toda la maquinaria de cultivo, la compactación queda confinada a huellas designadas (también llamadas tramlines) dentro de la parcela.
Al establecer nuevas líneas de recorrido para CTF, hay muchos factores a considerar para garantizar que las operaciones futuras sean eficientes en tiempo, con superposición reducida o áreas perdidas, el menor número de huellas y giros, y efectos adversos mínimos sobre la salud del suelo, como el riesgo de erosión y compactación. Las pequeñas ineficiencias en el diseño pueden acumularse con el tiempo, resultando en pérdidas significativas de tiempo y rentabilidad. Por eso, planificar y comparar opciones para cada parcela única puede ser no solo difícil sino también llevar mucho tiempo, especialmente sin la ayuda de programas como Launch Pad, que simplifica este proceso generando y gestionando líneas de recorrido comunes y optimizando los trazados para la eficiencia y la sostenibilidad.
Resumen del Caso de Estudio
- Persona
- Ben Slater, gerente de Strathaven Farm
- Finca
- Nymann Strathaven
- Ubicación
- Gran Región del Sur, Australia Occidental
- Superficie
- 12.000+ ha (Cultivo: 9.800+ ha)
- Cultivos
- Canola, trigo, cebada, altramuces
- Equipamiento
- Tractores Fendt, pulverizadores Agrifac, pulverizadores remolcados JTA, Sonic Boomsprays, cosechadoras CLAAS
- Guía de Maquinaria
- Fendt y Trimble
- Anchos de Maquinaria
- 12, 24, 36 y 48 m
El Desafío
Para Ben, el gerente de la finca Strathaven que gestiona a múltiples personas y planifica operaciones en entornos variables, la prioridad principal es aumentar la eficiencia y estandarizar los trayectos tanto en las parcelas ya establecidas como en las recién adquiridas.
Tras duplicar la base de tierras de la finca, se identificaron varios desafíos con la integración de las nuevas parcelas:
- Las parcelas recién obtenidas requerían la creación de líneas de recorrido comunes para CTF
- Las nuevas parcelas eran más pequeñas y con frecuencia tenían trazados/formas más complejos en comparación con las parcelas existentes cercanas a Gnowangerup
- Diseñar líneas de recorrido eficientes requería considerar múltiples tipos y anchos de maquinaria, y distribuirlos a dos sistemas de guía (Fendt y Trimble) para su uso en operaciones variadas y con personal de distintos perfiles
- La planificación del subsolado profundo en parcelas existentes y nuevas requiere un desfase de 15 grados de las líneas de recorrido, lo que también dificulta ver las líneas maestras CTF tras el subsolado
Para Strathaven Farms, la planificación CTF con Launch Pad fue especialmente importante en 2025. El software simplificó la integración de las nuevas parcelas sin líneas de recorrido preexistentes en su sistema CTF y configuraciones de maquinaria existentes, mitigando posibles ineficiencias como el desperdicio de combustible, la pérdida de tiempo y las operaciones inconsistentes. Estos problemas podrían acumularse en temporadas futuras. Con múltiples miembros de personal (algunos en su primer año usando maquinaria), era especialmente importante proporcionar una planificación de rutas clara y eficiente.
Para las nuevas parcelas, la planificación inteligente de rutas de Launch Pad creó líneas de recorrido optimizadas para cada parcela basándose en:
- El menor número de huellas requeridas
- El mayor número de superposición de huellas entre operaciones
- La menor distancia recorrida por los distintos tipos de equipos y actividades
El subsolado profundo complicó aún más las operaciones, ya que el desfase de 15 grados de las líneas de recorrido históricamente dificultaba el seguimiento visual de los trayectos anteriores. Launch Pad simplificó este proceso incorporando el cambio de ángulo requerido en el plan, garantizando al mismo tiempo que los operadores pudieran mantener la eficiencia en el trayecto ajustado.
Procesos y Funcionalidades de Launch Pad
Ben encontró que el proceso de generar nuevos planes en Launch Pad era bastante sencillo, sin dificultades notables al transferirlos desde su portátil a los sistemas de guía en las distintas máquinas.
Función "Planificar Desde"
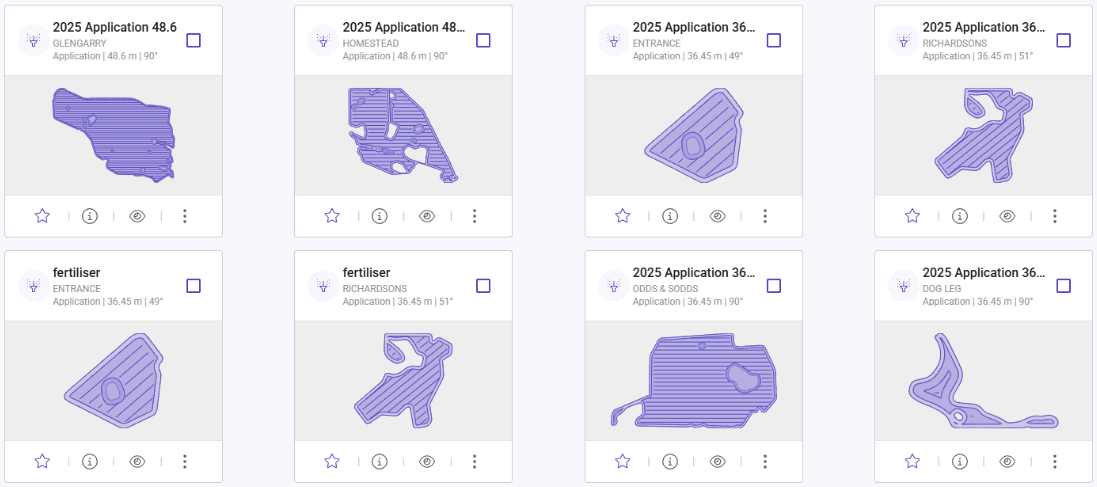
La función "Planificar Desde" en Launch Pad fue útil para Ben al comparar diferentes tipos y anchos de maquinaria en parcelas existentes y nuevas. Partiendo de un plan operativo (por ejemplo, siembra), podía usar los rumbos y puntos de inicio existentes para diseñar un plan de actividad secundaria, como una aplicación de pulverización. Esta función le permitió a Ben crear un plan estacional (un plan para cada operación durante la temporada) que apuntaba a maximizar el número de huellas compartidas entre cuatro anchos de maquinaria para minimizar el área transitada, al tiempo que proporcionaba información medible para cada opción de ruta, como el tiempo de trabajo o el número de giros.
Esta función "Planificar Desde" también fue útil al planificar cambios en los ángulos de las líneas de recorrido, como el subsolado profundo a 15 grados.
Alineación de Bordes de Nuevas Líneas de Recorrido
Al diseñar planes de parcela para las nuevas parcelas sin líneas de recorrido existentes, Ben frecuentemente seleccionó la opción de "alineación de bordes" para seguir el borde recto más largo en la mayoría de las parcelas. Esto se hizo para crear cohesión entre los planes de parcela y, de nuevo, reducir las ineficiencias y compartir el mayor número posible de las mismas líneas CTF entre las operaciones. La alineación de bordes fue el enfoque correcto para el sistema, demostrando consistentemente entregar las métricas de eficiencia más altas y ayudando a estandarizar las rutas. Este enfoque se aplicó parcela por parcela para cada nuevo campo.
Algunas parcelas tenían un "borde más largo" identificado por el programa, aunque la vegetación en las cabeceras impedía líneas rectas. En estos casos, Launch Pad pudo identificar una ruta más eficiente, que con frecuencia seguía el siguiente borde recto ininterrumpido más largo de la parcela, o la ruta con el menor número de huellas/giros.

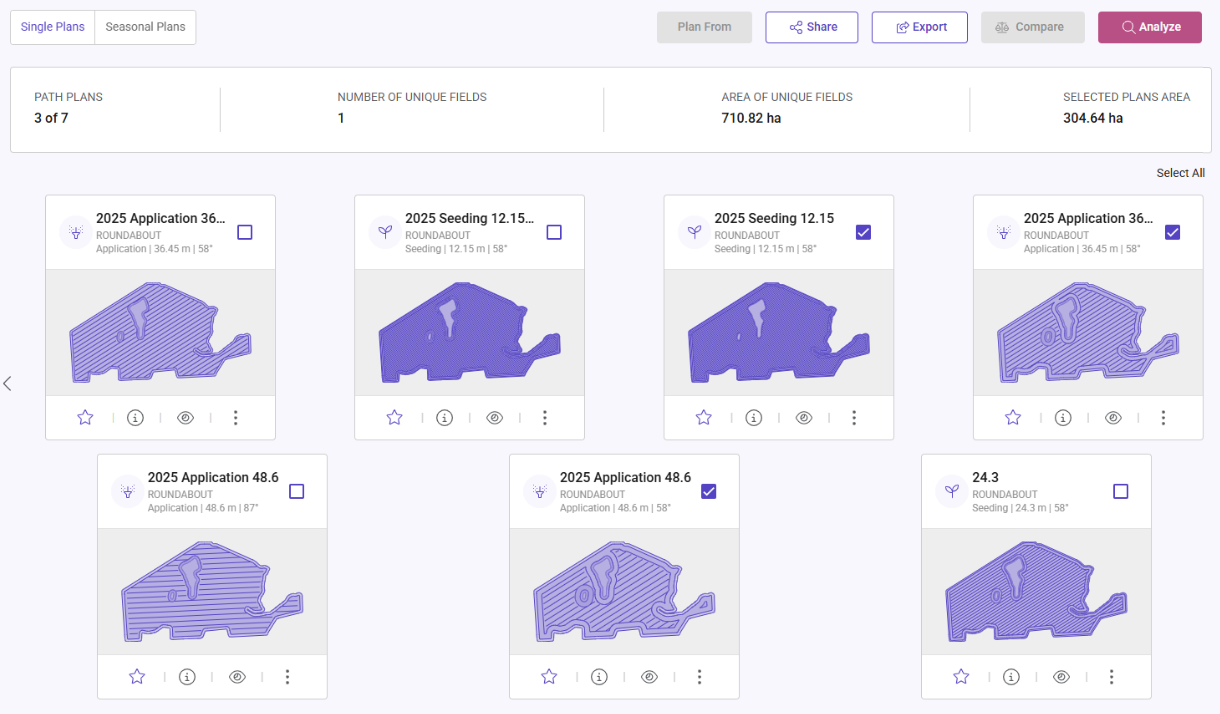
Análisis de Planes Estacionales
Ben encontró que la función "Analizar Proyectos de Líneas" de Launch Pad también fue útil para comparar métricas de eficiencia entre varios anchos de maquinaria. Ben pudo comparar métricas dentro de cada plan de parcela, además de poder ver visualmente las rutas superpuestas en el plan estacional y el número de huellas CTF compartidas. Esto permitió planificar antes de la temporada las combinaciones más eficientes y los rumbos de línea AB para todas las parcelas.
Ben utilizó un enfoque similar al identificar las líneas AB más compatibles y eficientes en parcelas donde no había líneas CTF preexistentes.
En algunos casos, Launch Pad identificó las rutas más cortas o rápidas, que implicaban giros complejos no compatibles con todos los anchos de maquinaria. Al comparar diferentes maquinarias, rumbos y rutas en el plan superpuesto, se pudo identificar y ajustar la ruta más consistente y eficiente.
Resultados
Algunas de las mejoras derivadas de la planificación de trayectos en eficiencia, consistencia y operación de maquinaria incluyeron:
- Menos tiempo invertido en la planificación de nuevos trayectos de parcela
- Facilidad de integración de nuevas líneas CTF
- Mayor eficiencia en la distancia recorrida por la maquinaria y el tiempo empleado en las actividades
- Mejora en la consistencia y cohesión de los trayectos de parcela, a pesar de la variedad de equipos, personal, tipos de parcela, sistemas de guía y operaciones
- Los cambios rápidos sobre la marcha en los planes de parcela aumentaron la eficiencia y la capacidad de resolución de problemas
- Optimización de maquinaria
- Líneas AB optimizadas
- Estandarización de rutas mediante metodología de alineación de bordes
- Superposición reducida
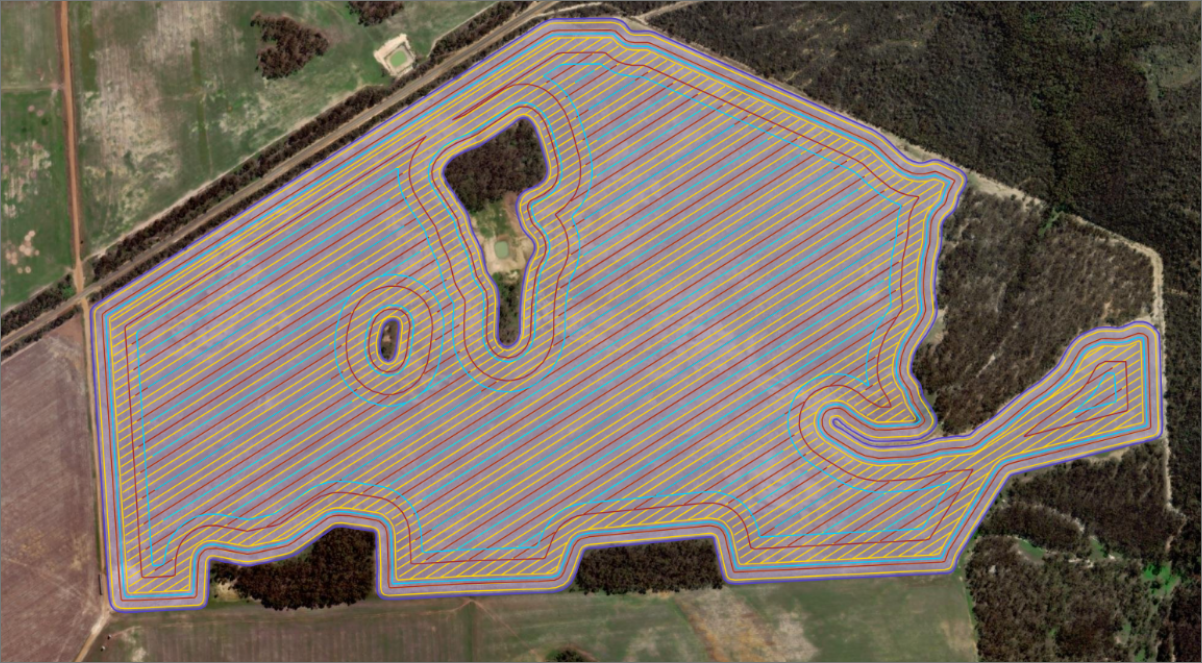
Al analizar la misma parcela de caso de estudio "Roundabout", las nuevas líneas de recorrido se determinaron evaluando los trayectos y rumbos más eficientes para las operaciones que típicamente demandan la mayor inversión de tiempo, es decir, siembra y cosecha. Al priorizar estas operaciones que consumen más tiempo, se seleccionaron las rutas más eficientes y cohesivas.
En este escenario, Launch Pad identificó un rumbo de 57,9 grados como la opción más eficiente en siembra y cosecha. Este rumbo tenía el menor número de huellas y el menor tiempo requerido para completar las operaciones.
Rumbo Convencional de 90 Grados
| Métrica | Sembradora Horsch 12,15 m |
Pulverizador Sonic 36,45 m |
Cosechadora CLAAS 12,15 m |
|---|---|---|---|
| Promedio de pasadas en la temporada | 1 | 4 | 1 |
| Número de huellas | 145 | 50 | 148 |
| Total de huellas en la temporada | 145 | 200 | 148 |
| Total de huellas en la temporada | 493 | ||
| Tiempo para completar (min) | 635 | 115 | 790 |
| Tiempo total en la temporada (min) | 635 | 452 | 790 |
| Tiempo Total (horas) | 31,3 | ||
| Superposición (ha) | 2,53 | 6,80 | 2,54 |
| Superposición total en la temporada (ha) | 2,53 | 27,20 | 2,54 |
| Superposición Acumulada Total (ha) | 32,27 | ||
| Porcentaje Promedio de Superposición Total | 5,32% | ||
Tabla 1. Métricas clave para la Parcela Roundabout en 2025 usando un rumbo convencional de 90 grados. Datos extraídos de Verge Launch Pad.
Rumbo Optimizado de 57,9 Grados
| Métrica | Sembradora Horsch 12,15 m |
Pulverizador Sonic 36,45 m |
Cosechadora CLAAS 12,15 m |
|---|---|---|---|
| Promedio de pasadas en la temporada | 1 | 4 | 1 |
| Número de huellas | 139 | 49 | 144 |
| Total de huellas en la temporada | 139 | 196 | 144 |
| Total de huellas en la temporada | 479 | ||
| Tiempo para completar (min) | 627 | 108 | 767 |
| Tiempo total en la temporada (min) | 627 | 432 | 767 |
| Tiempo Total (horas) | 30,4 | ||
| Superposición (ha) | 2,20 | 5,82 | 2,09 |
| Superposición total en la temporada (ha) | 2,20 | 23,28 | 2,09 |
| Superposición Total (ha) | 27,57 | ||
| Porcentaje Promedio de Superposición Total | 4,55% | ||
Tabla 2. Comparación de métricas operativas clave para la Parcela Roundabout usando el rumbo optimizado de 57,9 grados (menor tiempo para completar la siembra).
14
Menos huellas por temporada
0,9 h
Tiempo ahorrado por temporada
4,7 ha
Menos superposición por temporada
Y eso es solo una parcela. Strathaven Farms tiene 133.
Cuantificando los Costos de Superposición
Algunos beneficios, como una mayor facilidad de planificación, una mejor compatibilidad operativa y una mayor confianza en las operaciones, pueden considerarse intangibles. Sin embargo, ciertos beneficios de eficiencia pueden cuantificarse, como los costos de superposición.
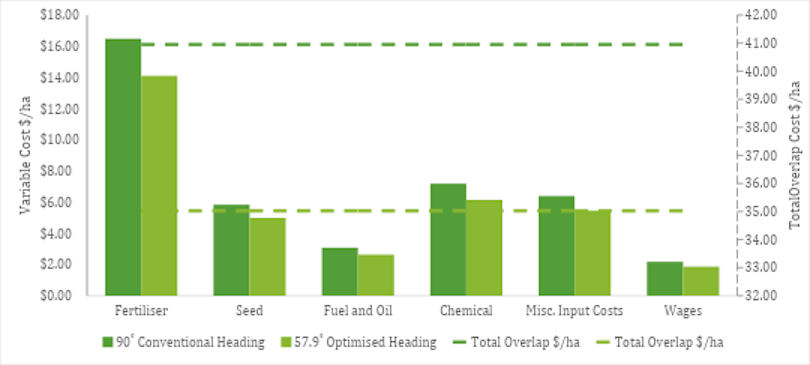
Al evaluar el impacto monetario de la reducción de superposición en los planes de parcela optimizados/más rápidos frente a un plan usando un rumbo AB convencional, se aplicaron datos de referencia promedio de los productores de la Zona Portuaria de Albany durante los últimos cinco años a los parámetros de costos clave, incluyendo combustible y aceite, fertilizantes, productos químicos y salarios.
| Categoría de Costo | Referencia $/ha |
Rumbo de 90 Grados | Rumbo de 57,9 Grados | ||
|---|---|---|---|---|---|
| Costo/parcela | Costo/ha | Costo/parcela | Costo/ha | ||
| Fertilizante | $310 | $1.666 | $16,49 | $1.425 | $14,11 |
| Costos de Semillas | $110 | $591 | $5,85 | $506 | $5,01 |
| Combustible y Aceite | $58 | $312 | $3,09 | $267 | $2,64 |
| Productos Químicos | $135 | $725 | $7,18 | $620 | $6,14 |
| Otros Costos de Insumos | $120 | $645 | $6,38 | $551 | $5,46 |
| Salarios | $41 | $220 | $2,18 | $188 | $1,87 |
| Costo total de superposición estacional | $4.158 | $3.556 | |||
| Costo de superposición por hectárea | $40,95 | $35,03 | |||
Tabla 3. Datos de referencia de costos derivados de la Zona Portuaria de Albany (promedio de 5 años) aplicados a la parcela "Roundabout" comparando las opciones de rumbo convencional y optimizado.
En este escenario, Strathaven Farms redujo los costos de superposición estacional en aproximadamente $6 por hectárea (equivalente a casi $600 en una sola parcela) al comparar las líneas CTF convencionales y optimizadas en una de las nuevas parcelas. Proyectados a lo largo de múltiples temporadas, estos ahorros demuestran cómo las ganancias de eficiencia incrementales pueden acumularse en mejoras sustanciales en la rentabilidad operativa general.
Desafíos
Algunas limitaciones encontradas incluyeron:
- La ausencia de plantillas de rumbo guardadas previamente requirió la entrada manual en cada parcela
- Cada plan descargado requirió extracción manual antes de la transferencia por USB
- Ciertos componentes del motor de planificación de rutas requerían refinamiento, particularmente en la lógica de planificación de giros
Estos problemas no impidieron la implementación, pero representan oportunidades de perfeccionamiento del producto.
Próximos Pasos
Strathaven Farms continuará aprovechando Launch Pad mientras trabaja hacia la autonomía y la estandarización de los planes de parcela e identificando las rutas de parcela más compatibles.
Con las líneas CTF ahora establecidas en todas las parcelas, el enfoque de Ben para la próxima temporada es aplicar las funcionalidades actualizadas de Launch Pad a las operaciones y continuar usando Launch Pad para refinar los planes existentes, "perfeccionando" donde sea necesario.


Agradecimientos
A través de la iniciativa Grain Automate, la Grains Research and Development Corporation (GRDC) se ha asociado con Verge Ag y la Australian Controlled Traffic Farming Association para apoyar la aceleración y adopción de la automatización de maquinaria, la autonomía y las tecnologías digitales en la industria australiana de granos. La investigación realizada como parte de este proyecto es posible gracias a las contribuciones significativas de los productores mediante la cooperación en ensayos y el apoyo de la GRDC.
Extendemos nuestro agradecimiento a Strathaven Farms, Ben Slater y al propietario Knud Nymann por compartir generosamente su tiempo y conocimientos que hicieron posible este caso de estudio.
¿Listo para Optimizar sus Operaciones?
Descubra cómo Launch Pad puede transformar la planificación de sus parcelas
Comience Ahora