Funcionalidades de Path Planner
Límites de Campo
Capture y valide los límites de campo desde múltiples fuentes con preprocesamiento automático para una planificación de rutas óptima.
Métodos de Importación

FMIS OEM Conectado
Importe directamente desde John Deere, CNHi y otras plataformas principales de equipos.
Importación Shapefile/ISO
Cargue shapefiles GIS estándar desde cualquier sistema de gestión agrícola.
Dibujo Manual
Dibuje límites directamente sobre imágenes satelitales con herramientas de precisión.
Selección por Satélite
Seleccione desde imágenes satelitales globales preprocesadas en segundos.
Preprocesamiento Automático
- Validación: Garantiza la integridad geométrica y elimina datos no válidos
- Simplificación: Elimina ruido y puntos redundantes para un procesamiento más rápido
- Suavizado: Optimiza las curvas de los límites para trayectorias realistas de las máquinas
- Zonas de Exclusión: Defina obstáculos transitables e intransitables (vías de agua, postes, zonas naturales)
Descomposición de Campo
Divida campos complejos en subcampos optimizados para mejorar la eficiencia, reducir las curvas y minimizar la pérdida de suelo.
Descomposición Manual
- Agregue puntos y trace líneas a través de ellos
- Dibuje líneas de división libremente
- Importe líneas de referencia externas de aplicaciones de terceros
- División automática de obstáculos entre subcampos
Descomposición Automática
- En línea recta: Crea subcampos convexos para reducir las curvas
- Basada en curvas: Usa curvas de nivel para campos en terrazas
- Algoritmo propietario identifica los puntos de partición óptimos
- Maximiza la cobertura minimizando la pérdida de suelo


Gestión de Cabeceras
Genere pasadas de cabecera optimizadas con suavizado adaptativo para cualquier radio de giro y práctica regional.
Tipos de Cabecera
Pasadas de Perímetro Completo
Una o más vueltas completas alrededor de los límites del campo y las zonas de exclusión.
Cabeceras Solo en Curvas
Cobertura solo donde las máquinas realmente giran, reduciendo pasadas innecesarias.
Sin Cabeceras
Para campos con carreteras o caminos accesibles para girar fuera del límite.
Funcionalidades Avanzadas
- Suavizado de Esquinas: Esquinas cuadradas o redondeadas para adaptarse a cualquier radio de giro
- Simplificación de Puntos: Elimina el ruido para trayectorias más limpias y más manejables
- Curvas Adaptativas: Permite la ejecución en campo con sistemas de guiado
- Personalización Regional: Se adapta a las prácticas agrícolas locales

Cabecera

Sin Cabeceras
Análisis de Límites
El aprendizaje automático y la visión por computadora extraen características críticas de los límites para una planificación de rutas inteligente.
Bordes Rectos
El aprendizaje automático identifica segmentos de límite casi rectos para alineación y simplificación.
Curvas de Referencia
La geometría computacional extrae segmentos curvos largos adecuados para la planificación de pistas curvas.
Límites por Elevación
Detecta contornos de clúster a partir de datos MDE - límites topográficos naturales superiores a las líneas de elevación única.
Modelo Digital de Elevación (MDE)
Construye modelos de terreno 3D a partir de fuentes de datos públicas o telemetría de equipos. Extrae características topográficas como curvas de nivel y divisiones naturales de campo esenciales para la planificación consciente de la pendiente y la minimización de la erosión del suelo.

Planificación de Pistas Rectas
Los algoritmos de planificación de rutas generan pistas rectas paralelas optimizadas para cobertura, eficiencia y múltiples objetivos.
Objetivos de Optimización
Objetivos Primarios
- Maximizar el área de cobertura operacional
- Minimizar la superposición (doble cobertura)
- Manejar obstáculos transitables e intransitables
Optimización Secundaria
- Minimizar el número de curvas
- Reducir el tiempo total y la distancia
- Minimizar filas de punto (superposición de cabecera)
- Reducir el potencial de pérdida de suelo
Alineación y Rotación
- Alinee a cualquier rumbo (0-179° o decimal personalizado)
- Traslación automática para alineación perfecta de bordes
- Gire los planes manteniendo la cobertura óptima
Patrones Avanzados
- Fila Estimada: Ajuste automático del espaciado para reducir pasadas parciales
- Abanico: Cambio gradual de dirección entre bordes paralelos

Planificación de Pistas Curvas
Algoritmos propietarios generan pistas curvas para límites irregulares y terrenos accidentados, significativamente más complejos que la planificación recta.

Procesamiento de Curva de Referencia
Las pistas curvas se generan desplazando curvas de referencia (curvas de límite, curvas de nivel o contornos de clúster). El preprocesamiento garantiza que las curvas sean adecuadas para la planificación de rutas:
- Elimina segmentos sinuosos, comprimidos y con autointersección
- Garantiza la maniobrabilidad para equipos del mundo real
- Valida la viabilidad geométrica
Proyección Ortogonal
Proyecta las curvas de referencia en una o ambas direcciones por el ancho de la pista hasta cubrir el campo. Mantiene la distancia perpendicular igual al ancho de la pista para una cobertura completa.
- Relaja la ortogonalidad cuando las pistas se comprimen para mantener la maniobrabilidad
- Aplica suavizado a cada pista antes de generar la siguiente
- Gestiona la densidad de vértices para evitar trayectorias excesivamente complejas
Doble Curva de Referencia
Para campos en terrazas, concilia dos curvas de referencia comenzando con la proyección ortogonal de la primera curva y adaptándose gradualmente a la forma de la segunda curva. Funciona mejor cuando las curvas son ligeramente diferentes.
Planificación 3D del Terreno
Capacidad única para planificar en tres dimensiones, evaluando el potencial de erosión del suelo y optimizando las rutas para variaciones de elevación.
Modelado de Terreno 3D
Construye modelos de campo 3D a partir de Modelos Digitales de Elevación (MDE) provenientes de datos públicos o telemetría de equipos. Renderizados como rasters para extraer características topográficas como curvas de nivel y divisiones naturales de campo.
Análisis de Erosión del Suelo
Utiliza la Ecuación Universal de Pérdida de Suelo Revisada (RUSLE) para medir la pérdida de suelo en función de la precipitación, el tipo de suelo, las prácticas de cobertura, el tipo de cultivo y el terreno.
Factor LS (Factor Longitud-Pendiente)
Producto de la longitud de la pendiente y el porcentaje de inclinación, parámetro clave para evaluar el efecto del terreno sobre la erosión.
Pistas Rectas 3D
Minimiza el potencial de pérdida de suelo y optimiza el desplazamiento cuesta arriba y cuesta abajo en zonas de alta pendiente.
Pistas Curvas 3D
Proceso de generación más complejo con un manejo elegante de la división de curvas y el análisis de pendientes para evitar errores de punto flotante.

Análisis de Planes
Estadísticas completas y herramientas de comparación para evaluar opciones de ruta y seleccionar el plan óptimo.
Estadísticas Resumen del Plan
Los gráficos de líneas muestran los valores resumen entre las partes del campo cuando los campos se descomponen y planifican por separado.
Comparación en Paralelo
Compare dos planes visual y estadísticamente para evaluar los compromisos. Incluye una calculadora sencilla de comparación de costos.
- Superposición visual de diferentes opciones de ruta
- Comparación estadística de todas las métricas
- Análisis de costos basado en tiempo, distancia y superposición
- Compare planes en borrador o planes guardados

Exportar y Guardar
Exporte planes de rutas en múltiples formatos compatibles con todas las principales marcas de equipos y sistemas de guiado.
Formatos de Exportación
Formatos Específicos por OEM
- John Deere Operations Center
- CNHi (Case IH, New Holland)
- Trimble
Métodos de Entrega
- Directo al FMIS OEM (inalámbrico al equipo)
- Descarga de archivo para importación manual
- Sincronización automática con máquinas conectadas
Genérico
- ISO XML
- KML
- Shapefile
Formatos de Archivo
- Agres
- CNH CN1
- FendtONE
- Hexagon
- Jacto
- JD File
- Precision Planting
- Raven
- Stara
- Topcon
- Trimble
Objetos Exportables
Guiado tradicional de una sola línea para sistemas básicos
Trayectorias completas de pista para guiado avanzado
Pasadas de perímetro y zonas de giro
Límites exteriores e interiores para el control de secciones
Curvas, Maniobras, Conectores de cabecera y Travesías
Planes Guardados ("Decisiones del Agricultor")
Filtre y gestione planes guardados por campo, tipo de operación y fecha. Realice acciones sobre varios planes simultáneamente.
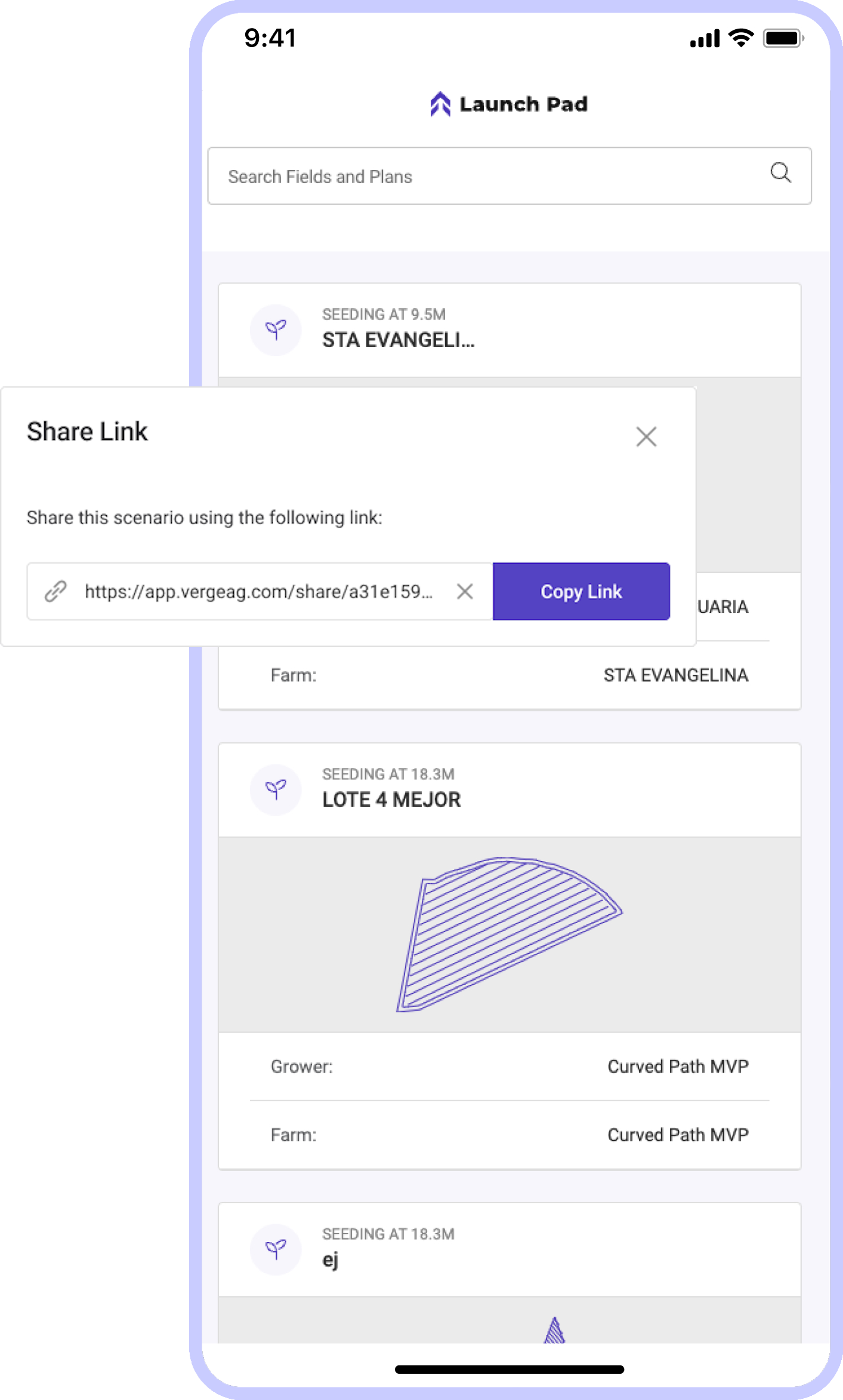
Colaboración
Comparta planes digitalmente con operadores y miembros del equipo para validar decisiones y proporcionar instrucciones gráficas de tareas.
Compartir Planes
Funcionalidad de colaboración fundamental integrada en el ecosistema Launch Pad desde el primer día. Comparta cualquier plan con los miembros del equipo para validación y retroalimentación.
- Comparta con operadores, agrónomos y gestores de finca
- La comunicación digital reemplaza las instrucciones verbales
- Garantiza que todos trabajen con el mismo plan
Instrucciones de Tarea Basadas en Ruta
Los planes compartidos con rutas se convierten en instrucciones gráficas de tareas. Mientras los planes exportados guían los equipos, los planes compartidos en teléfonos/tabletas informan a los operadores cómo completar las operaciones.
Los operadores pueden ver la ruta completa, la secuencia de curvas y el contexto operacional en dispositivos complementarios mientras ejecutan el plan en el campo.
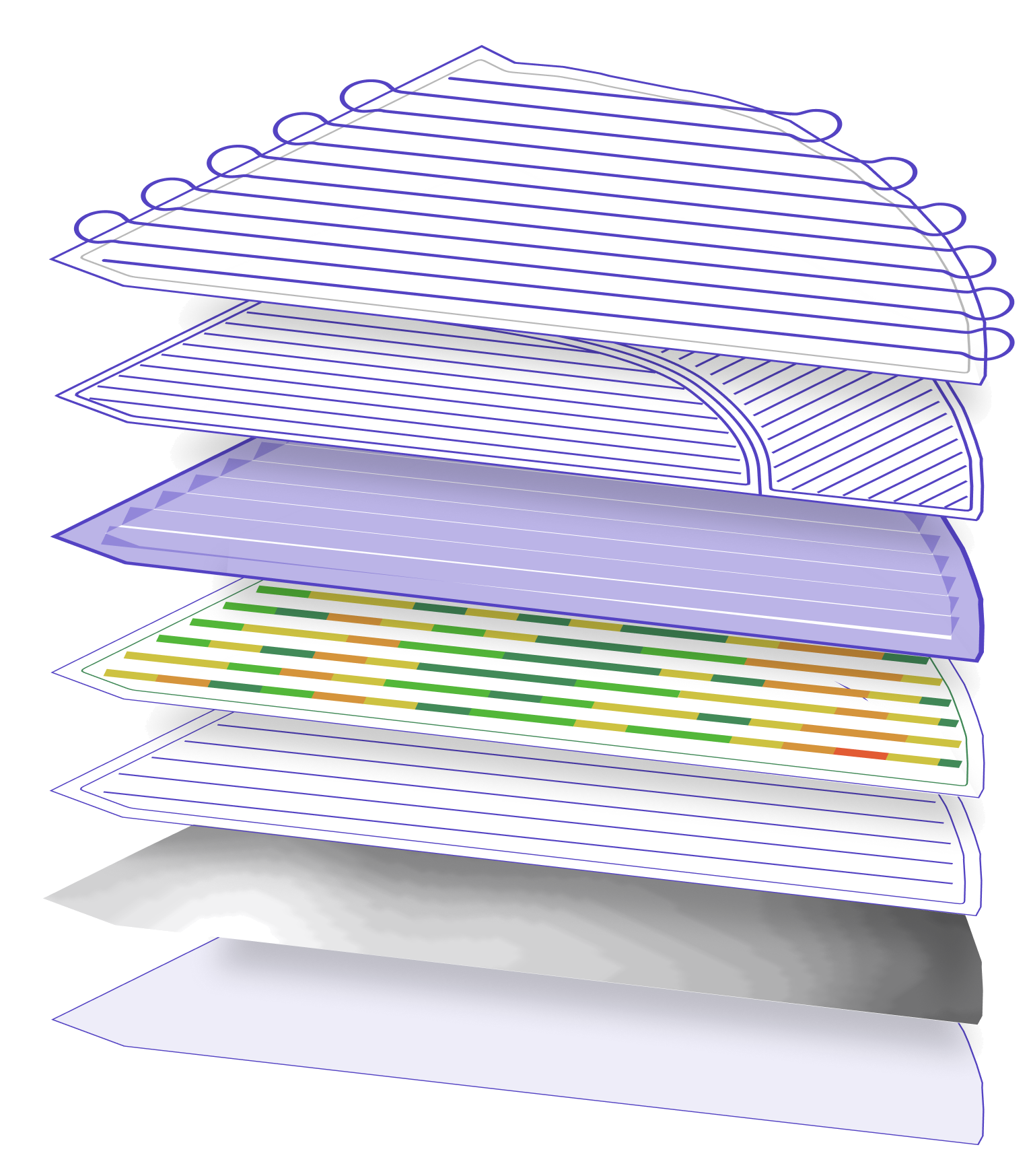
Gemelo Digital
Path Planner crea gemelos digitales completos de los campos superponiendo datos geométricos, físicos y operacionales.
Gemelo Digital de Siete Capas
-
1Capa de Ruta Completa
Trayectoria completa de la máquina de extremo a extremo con curvas
-
2Capa del Plan de Ruta
Trayectorias de movimiento de equipos optimizadas
-
3Capa de Cobertura
Cobertura total del implemento con superposición minimizada
-
4Capa de Pendiente
Optimización de pendiente para equipos y control de erosión
-
5Capa de Descomposición
Particiones de subcampo para eficiencia operacional
-
6Capa de Topografía
Representación 3D del terreno con datos de elevación
-
7Capa de Geometría del Campo
Características de los límites y análisis de forma
Agregación a Nivel de Finca
Los gemelos digitales de campos individuales se agregan en un gemelo digital completo de la finca. Esto permite la optimización de la gestión de tierras en toda la finca, el diseño de la flota de equipos y la planificación operacional en todos los campos y operaciones.
Generación de Ruta Completa
Rutas completas de extremo a extremo que incluyen trayectorias, curvas, secuenciación y conexiones de punto de inicio/fin, esenciales para sistemas autónomos.
Capacidades Completas de Enrutamiento
Nuestra solución de enrutamiento de última generación soporta campos arbitrariamente complejos con modelado sofisticado de curvas, navegación de cabeceras y optimización inteligente de trayectorias.
- Modelado Inteligente de Curvas: Selecciona automáticamente los tipos de curva óptimos (curvas en U, curvas en bulbo, curvas en P) según la geometría del campo y las características del equipo.
- Navegación Avanzada de Cabeceras: Permite la travesía eficiente entre áreas del campo con opciones configurables para patrones de cabecera primero o cabecera último, preferencia por la cabecera más exterior y travesías completas de cabecera alrededor de obstáculos complejos.
- Algoritmo de Enrutamiento Propietario: Calcula distancias entre todos los pares de pistas para crear una trayectoria optimizada que minimiza la distancia no productiva mientras maneja campos irregulares, zonas de exclusión y múltiples obstáculos.
- Enrutamiento por Capacidad: Planifique puntos de recarga y optimice rutas según la capacidad y caudal del vehículo. Los flujos de trabajo de vehículo único admiten puntos de recarga exactos, posicionamiento en el inicio de pista o en la cabecera exterior más cercana. El enrutamiento de área de aparcamiento para múltiples vehículos (CVRP) optimiza las operaciones de flota con vehículos que regresan a los depósitos de aparcamiento cuando se alcanza la capacidad.
- Capacidades Adicionales: Funcionalidades experimentales como suavizado manejable y soporte para implementos remolcados, además de amplias opciones de configuración para adaptarse a sus preferencias operacionales.
Véalo en Acción
Explore ejemplos detallados, demostraciones visuales y explicaciones en profundidad de todas las capacidades de enrutamiento
Explore el Escaparate Completo de Enrutamiento