Функции Path Planner
Границы Поля
Фиксируйте и проверяйте границы поля из нескольких источников с автоматической предобработкой для оптимального планирования маршрутов.
Методы Импорта

Подключённая система FMIS OEM
Импортируйте напрямую из John Deere, CNHi и других ведущих платформ сельхозтехники.
Импорт Shapefile/ISO
Загружайте стандартные GIS-шейпфайлы из любой системы управления сельским хозяйством.
Ручное Рисование
Рисуйте границы прямо на спутниковых снимках с помощью инструментов точного построения.
Выбор по Спутниковым Снимкам
Выбирайте из предварительно обработанных глобальных спутниковых снимков за секунды.
Автоматическая Предобработка
- Проверка: Обеспечивает геометрическую целостность и удаляет некорректные данные
- Упрощение: Устраняет шумы и лишние точки для ускоренной обработки
- Сглаживание: Оптимизирует кривые границ для реалистичных маршрутов техники
- Зоны Исключения: Задайте проходимые и непроходимые препятствия (водотоки, опоры, природоохранные зоны)
Декомпозиция Поля
Разбивайте сложные поля на оптимизированные подполя для повышения эффективности, сокращения разворотов и минимизации эрозии почвы.
Ручная Декомпозиция
- Добавляйте точки и проводите через них линии
- Свободное рисование разделительных линий
- Импорт внешних опорных линий из сторонних приложений
- Автоматическое разбиение препятствий между подполями
Автоматическая Декомпозиция
- По прямым линиям: Создаёт выпуклые подполя для сокращения разворотов
- По кривым: Использует горизонтали для террасированных полей
- Фирменный алгоритм определяет оптимальные точки раздела
- Максимизирует охват, минимизируя потери почвы


Управление Поворотными Полосами
Формируйте оптимизированные проходы поворотной полосы с адаптивным сглаживанием для любого радиуса поворота и региональных практик.
Типы Поворотных Полос
Проходы по Полному Периметру
Один или несколько полных кругов вокруг границ поля и зон исключения.
Только Разворотные Полосы
Покрытие только там, где техника фактически разворачивается, что сокращает излишние проходы.
Без Поворотных Полос
Для полей с доступными дорогами или проездами для разворота за пределами границы.
Расширенные Возможности
- Скругление Углов: Прямые или скруглённые углы под любой радиус поворота
- Упрощение Точек: Устраняет шумы для более чистых и управляемых маршрутов
- Адаптивные Кривые: Обеспечивает полевое исполнение с системами навигации
- Региональная Настройка: Адаптируется к местным агрономическим практикам

Поворотная Полоса

Без Поворотных Полос
Анализ Границ
Машинное обучение и компьютерное зрение извлекают ключевые характеристики из границ для интеллектуального планирования маршрутов.
Прямые Края
МО выявляет почти прямые участки границ для выравнивания и упрощения.
Опорные Кривые
Вычислительная геометрия извлекает протяжённые криволинейные сегменты для планирования криволинейных гонов.
Высотные Границы
Определяет кластерные контуры по данным ЦМР — естественные топографические границы, превосходящие одноуровневые горизонтали.
Цифровая Модель Рельефа (ЦМР)
Строит 3D-модели рельефа из открытых источников данных или телеметрии техники. Извлекает топографические особенности — горизонтали и естественные разделы поля, необходимые для планирования с учётом уклонов и минимизации эрозии почвы.

Планирование Прямых Гонов
Основные алгоритмы планирования маршрутов генерируют параллельные прямые гоны, оптимизированные по охвату, эффективности и множеству целевых критериев.
Цели Оптимизации
Основные Цели
- Максимизировать площадь операционного охвата
- Минимизировать перекрытия (двойной проход)
- Учитывать проходимые и непроходимые препятствия
Дополнительная Оптимизация
- Минимизировать количество разворотов
- Сократить общее время и расстояние
- Минимизировать клиновые ряды (перекрытие поворотной полосы)
- Снизить потенциал потери почвы
Выравнивание и Поворот
- Выравнивание по любому направлению (0–179° или произвольный десятичный)
- Автоматическая трансляция для идеального выравнивания краёв
- Поворот плана с сохранением оптимального охвата
Расширенные Шаблоны
- Угадываемый Ряд (Guess Row): Автоматическая подстройка шага для сокращения неполных проходов
- Веер (Fanning): Постепенное изменение направления между параллельными краями

Планирование Криволинейных Гонов
Фирменные алгоритмы генерируют криволинейные гоны для нерегулярных границ и сложного рельефа — значительно сложнее, чем планирование прямых маршрутов.

Обработка Опорной Кривой
Криволинейные гоны генерируются путём смещения опорных кривых (кривые границ, горизонтали или кластерные контуры). Предобработка гарантирует пригодность кривых для планирования маршрутов:
- Устраняет петляющие, сжатые и самопересекающиеся сегменты
- Обеспечивает управляемость для реальной техники
- Проверяет геометрическую осуществимость
Ортогональная Проекция
Проецирует опорные кривые в одном или обоих направлениях на ширину гона до полного покрытия поля. Поддерживает перпендикулярное расстояние, равное ширине гона, для полного охвата.
- Ослабляет ортогональность при сжатии гонов для сохранения управляемости
- Применяет сглаживание к каждому гону перед генерацией следующего
- Управляет плотностью вершин для предотвращения избыточно сложных маршрутов
Двойная Опорная Кривая
Для террасированных полей согласует две опорные кривые, начиная с ортогональной проекции первой кривой и постепенно адаптируясь к форме второй кривой. Наилучший результат достигается при незначительном различии кривых.
3D-планирование Рельефа
Уникальная возможность планирования в трёх измерениях с оценкой потенциала эрозии почвы и оптимизацией маршрутов для переменных высот.
3D-моделирование Рельефа
Строит 3D-модели полей из Цифровых Моделей Рельефа (ЦМР), полученных из открытых данных или телеметрии техники. Отображается в виде растров для извлечения топографических особенностей — горизонталей и естественных разделов поля.
Анализ Эрозии Почвы
Применяет Пересмотренное универсальное уравнение потерь почвы (RUSLE) для расчёта смыва почвы в зависимости от осадков, типа почвы, агротехнических приёмов, культуры и рельефа.
Фактор LS (Фактор Длины и Крутизны Склона)
Произведение длины склона и процентного уклона — ключевой параметр оценки влияния рельефа на эрозию.
3D Прямые Гоны
Минимизирует потенциал потери почвы и оптимизирует движение вверх и вниз по склону в зонах с высоким уклоном.
3D Криволинейные Гоны
Более сложный процесс генерации с элегантной обработкой разбиения кривых и анализа уклонов для исключения ошибок с плавающей точкой.

Аналитика Планов
Исчерпывающая статистика и инструменты сравнения для оценки вариантов маршрута и выбора оптимального плана.
Сводная Статистика Плана
Линейные графики отображают сводные значения по частям поля при декомпозиции и раздельном планировании.
Сравнение Рядом
Сравнивайте два плана визуально и статистически для оценки компромиссов. Включает простой калькулятор сравнения затрат.
- Визуальное наложение различных вариантов маршрута
- Статистическое сравнение всех показателей
- Анализ затрат на основе времени, расстояния и перекрытий
- Сравнение черновых или сохранённых планов

Экспорт и Сохранение
Экспортируйте планы маршрутов в нескольких форматах, совместимых со всеми ведущими марками сельхозтехники и навигационными системами.
Форматы Экспорта
Форматы OEM-производителей
- John Deere Operations Center
- CNHi (Case IH, New Holland)
- Trimble
Способы Доставки
- Напрямую в OEM FMIS (беспроводно на технику)
- Скачивание файла для ручного импорта
- Автоматическая синхронизация с подключёнными машинами
Универсальные
- ISO XML
- KML
- Shapefile
Форматы Файлов
- Agres
- CNH CN1
- FendtONE
- Hexagon
- Jacto
- JD File
- Precision Planting
- Raven
- Stara
- Topcon
- Trimble
Экспортируемые Объекты
Традиционная однолинейная навигация для базовых систем
Полные траектории гонов для расширенной навигации
Проходы по периметру и разворотные зоны
Внешние и внутренние границы для секционного контроля
Повороты, Манёвры, Соединители поворотных полос и Переезды
Сохранённые Планы ("Решения Фермера")
Фильтруйте и управляйте сохранёнными планами по полю, типу операции и дате. Применяйте действия к нескольким планам одновременно.
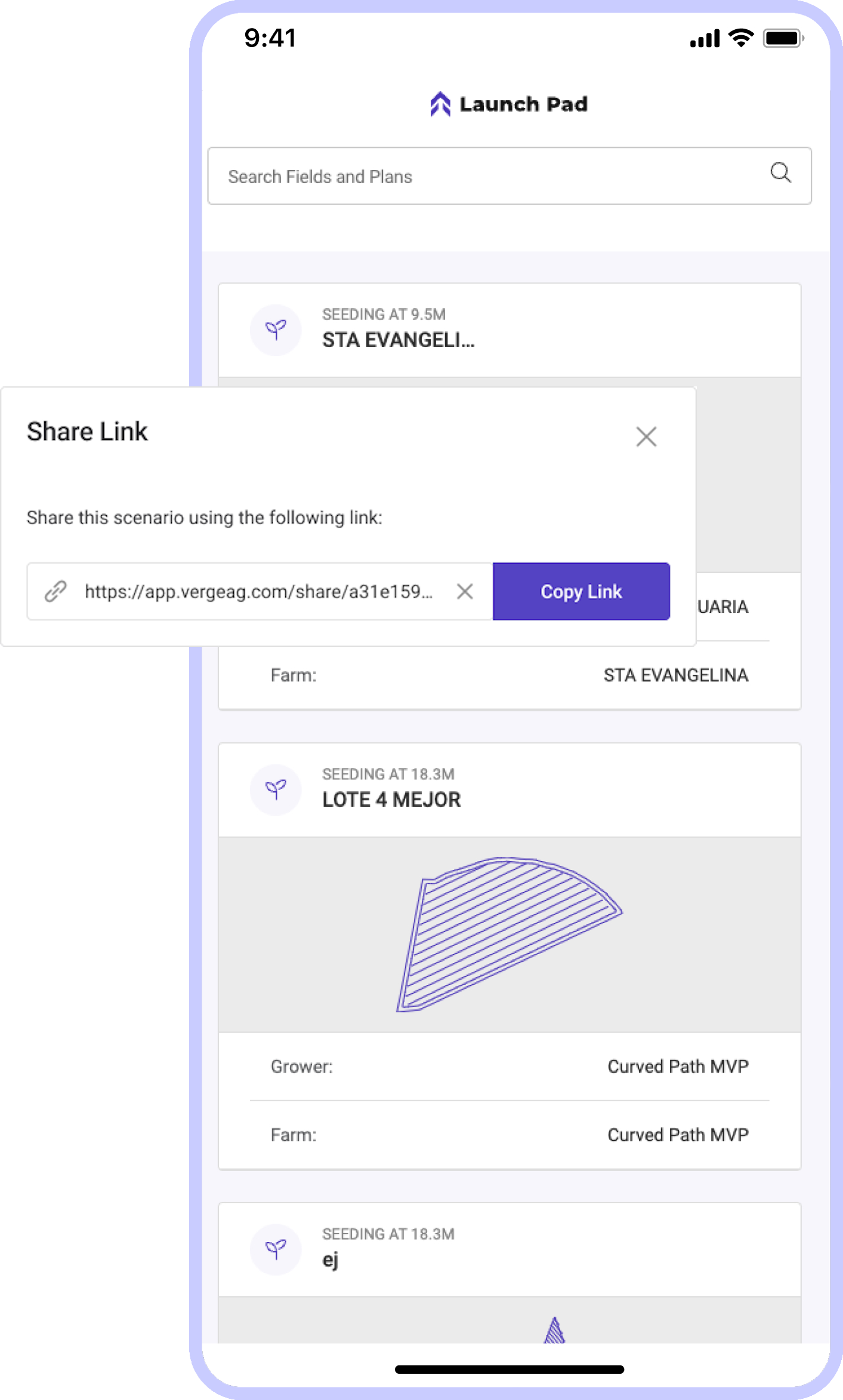
Совместная Работа
Делитесь планами в цифровом виде с операторами и членами команды для проверки решений и предоставления графических инструкций по задачам.
Обмен Планами
Основополагающая функция совместной работы, встроенная в экосистему Launch Pad с первого дня. Делитесь любым планом с членами команды для проверки и обратной связи.
- Делитесь с операторами, агрономами и управляющими хозяйством
- Цифровое общение заменяет устные инструкции
- Гарантирует работу всех по единому плану
Инструкции по Задаче на Основе Маршрута
Общие планы с маршрутами становятся графическими инструкциями по задаче. Экспортированные планы управляют техникой, а общие планы на телефонах и планшетах информируют операторов о порядке выполнения работ.
Операторы могут просматривать полный маршрут, последовательность разворотов и операционный контекст на вспомогательных устройствах при выполнении плана в поле.
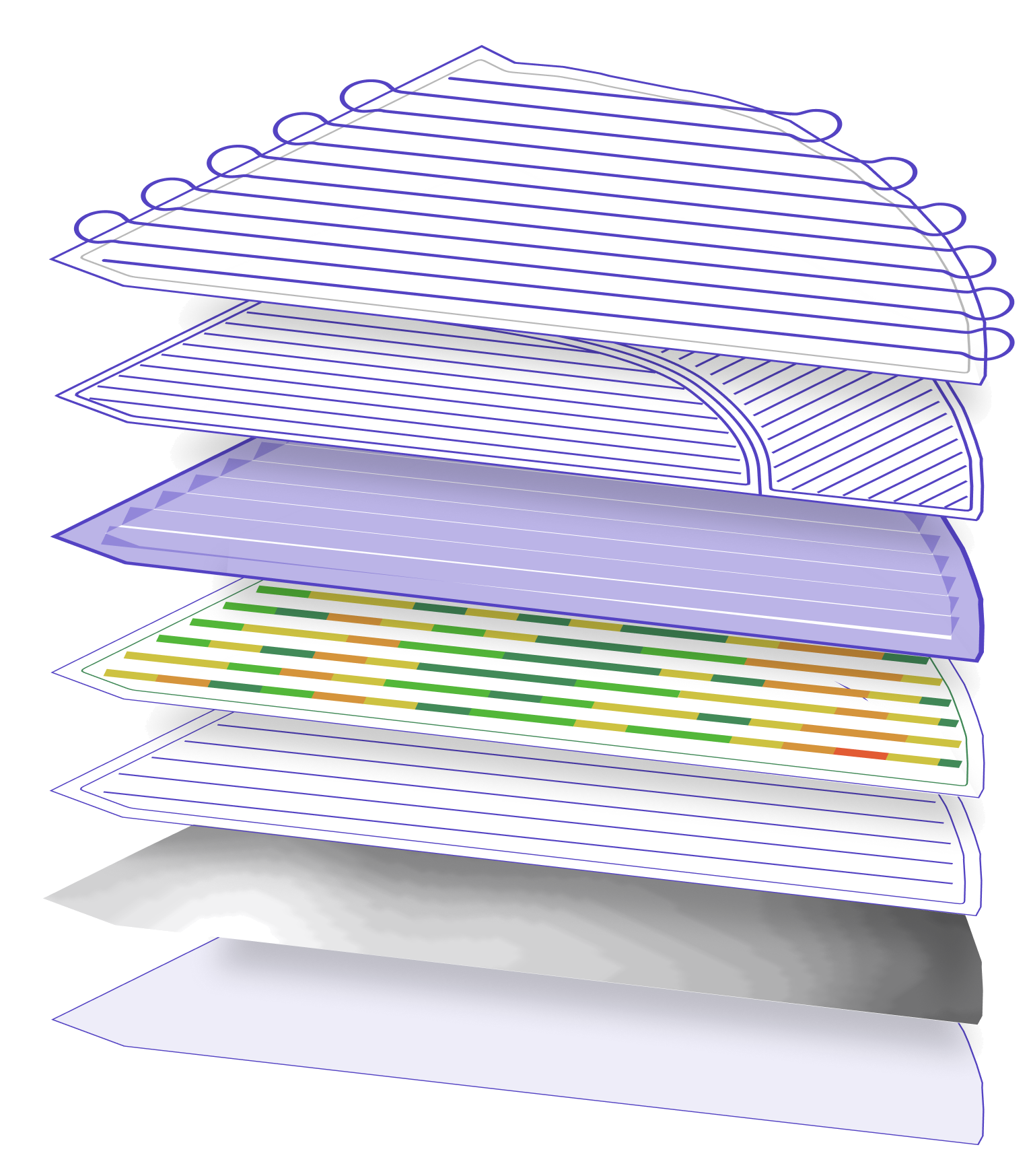
Цифровой Двойник
Path Planner создаёт комплексные цифровые двойники полей, объединяя геометрические, физические и операционные данные.
Семислойный Цифровой Двойник
-
1Слой Полного Маршрута
Полная траектория движения техники от начала до конца с разворотами
-
2Слой Плана Маршрута
Оптимизированные траектории движения техники
-
3Слой Охвата
Полный охват орудием с минимизированным перекрытием
-
4Слой Уклонов
Оптимизация уклонов для техники и контроля эрозии
-
5Слой Декомпозиции
Разделы подполей для операционной эффективности
-
6Слой Топографии
3D-представление рельефа с данными высот
-
7Слой Геометрии Поля
Характеристики границ и анализ формы
Агрегация на Уровне Хозяйства
Цифровые двойники отдельных полей объединяются в комплексный цифровой двойник всего хозяйства. Это позволяет оптимизировать управление угодьями, проектировать парк техники и планировать операции по всем полям и работам.
Полная Генерация Маршрута
Полные маршруты от начала до конца, включая траектории, повороты, последовательность и соединения точек старта/финиша, необходимые для автономных систем.
Комплексные Возможности Маршрутизации
Наше передовое решение маршрутизации поддерживает произвольно сложные поля с изощрённым моделированием разворотов, навигацией по поворотным полосам и интеллектуальной оптимизацией траектории.
- Интеллектуальное Моделирование Разворотов: Автоматически выбирает оптимальные типы разворота (U-образные, объёмные, P-образные) с учётом геометрии поля и характеристик техники.
- Расширенная Навигация по Поворотным Полосам: Обеспечивает эффективный переход между зонами поля с настраиваемыми параметрами: сначала поворотная полоса или в конце, предпочтение крайней внешней полосе и полные обходы по поворотной полосе вокруг сложных препятствий.
- Фирменный Алгоритм Маршрутизации: Рассчитывает расстояния между всеми парами гонов для построения оптимизированного маршрута, минимизирующего непродуктивный пробег при работе с нерегулярными полями, зонами исключения и множеством препятствий.
- Маршрутизация по Грузоподъёмности: Планируйте точки дозаправки и оптимизируйте маршруты с учётом ёмкости и расхода. Рабочие процессы для одной единицы техники поддерживают точные точки заправки, позиционирование в начале гона или у ближайшей внешней поворотной полосы. Маршрутизация с площадкой для нескольких единиц техники (CVRP) оптимизирует работу парка с возвратом на накопительные площадки при исчерпании ёмкости.
- Дополнительные Возможности: Экспериментальные функции, такие как управляемое сглаживание и поддержка прицепных орудий, а также расширенные параметры настройки под ваши рабочие предпочтения.
Смотреть в Действии
Изучите подробные примеры, визуальные демонстрации и исчерпывающие объяснения всех возможностей маршрутизации
Открыть Полный Демонстрационный Раздел Маршрутизации