Recursos do Path Planner
Limites de Talhão
Capture e valide os limites de talhão de múltiplas fontes com pré-processamento automático para um planejamento de rotas otimizado.
Métodos de Importação

FMIS OEM Conectado
Importe diretamente do John Deere, CNHi e outras principais plataformas de equipamentos.
Importação Shapefile/ISO
Faça upload de shapefiles GIS padrão de qualquer sistema de gestão agrícola.
Desenho Manual
Desenhe limites diretamente sobre imagens de satélite com ferramentas de precisão.
Seleção via Satélite
Selecione a partir de imagens de satélite globais pré-processadas em segundos.
Pré-processamento Automático
- Validação: Garante a integridade geométrica e remove dados inválidos
- Simplificação: Elimina ruídos e pontos redundantes para processamento mais rápido
- Suavização: Otimiza as curvas dos limites para trajetórias realistas de máquinas
- Zonas de Exclusão: Defina obstáculos transitáveis e intransitáveis (cursos d'água, postes, áreas de preservação)
Decomposição de Talhão
Divida talhões complexos em subtalhões otimizados para melhorar a eficiência, reduzir as curvas e minimizar a perda de solo.
Decomposição Manual
- Adicione pontos e trace linhas passando por eles
- Desenhe linhas de divisão livremente
- Importe linhas de referência externas de aplicativos de terceiros
- Divisão automática de obstáculos entre subtalhões
Decomposição Automática
- Em linha reta: Cria subtalhões convexos para reduzir as curvas
- Baseada em curvas: Usa curvas de nível para talhões em terraços
- Algoritmo proprietário identifica os pontos de partição ideais
- Maximiza a cobertura minimizando a perda de solo


Gestão de Cabeceiras
Gere passadas de cabeceira otimizadas com suavização adaptativa para qualquer raio de curva e prática regional.
Tipos de Cabeceira
Passadas de Perímetro Completo
Uma ou mais voltas completas ao redor dos limites do talhão e das zonas de exclusão.
Cabeceiras Apenas nas Curvas
Cobertura somente onde as máquinas efetivamente realizam curvas, reduzindo passadas desnecessárias.
Sem Cabeceiras
Para talhões com estradas ou caminhos acessíveis para realizar curvas fora do limite.
Recursos Avançados
- Suavização de Cantos: Cantos quadrados ou arredondados para se adequar a qualquer raio de curva
- Simplificação de Pontos: Remove ruídos para trajetórias mais limpas e mais manobráveis
- Curvas Adaptativas: Permite a execução no campo com sistemas de orientação
- Personalização Regional: Adapta-se às práticas agrícolas locais

Cabeceira

Sem Cabeceiras
Análise de Limites
Aprendizado de máquina e visão computacional extraem características críticas dos limites para um planejamento de rotas inteligente.
Bordas Retas
O aprendizado de máquina identifica segmentos de limite quase retos para alinhamento e simplificação.
Curvas de Referência
A geometria computacional extrai segmentos curvos longos adequados para o planejamento de faixas curvas.
Limites por Elevação
Detecta contornos de cluster a partir de dados MDE - limites topográficos naturais superiores às linhas de elevação única.
Modelo Digital de Elevação (MDE)
Constrói modelos de terreno 3D a partir de fontes de dados públicas ou telemetria de equipamentos. Extrai características topográficas como curvas de nível e divisões naturais de talhão, essenciais para o planejamento com consciência de declividade e minimização da erosão do solo.

Planejamento de Faixas Retas
Algoritmos de planejamento de rotas geram faixas retas paralelas otimizadas para cobertura, eficiência e múltiplos objetivos.
Objetivos de Otimização
Metas Primárias
- Maximizar a área de cobertura operacional
- Minimizar sobreposição (cobertura dupla)
- Tratar obstáculos transitáveis e intransitáveis
Otimização Secundária
- Minimizar o número de curvas
- Reduzir tempo total e distância percorrida
- Minimizar fileiras de ponto (sobreposição de cabeceira)
- Reduzir o potencial de perda de solo
Alinhamento e Rotação
- Alinhe a qualquer direção (0-179° ou decimal personalizado)
- Translação automática para alinhamento perfeito de bordas
- Gire os planos mantendo a cobertura ideal
Padrões Avançados
- Linha Estimada: Ajuste automático do espaçamento para reduzir passadas parciais
- Leque: Mudança gradual de direção entre bordas paralelas

Planejamento de Faixas Curvas
Algoritmos proprietários geram faixas curvas para limites irregulares e terrenos acidentados, significativamente mais complexo do que o planejamento de faixas retas.

Processamento de Curva de Referência
As faixas curvas são geradas por deslocamento de curvas de referência (curvas de limite, curvas de nível ou contornos de cluster). O pré-processamento garante que as curvas sejam adequadas para o planejamento de rotas:
- Remove segmentos sinuosos, comprimidos e com autointersecção
- Garante a dirigibilidade para equipamentos do mundo real
- Valida a viabilidade geométrica
Projeção Ortogonal
Projeta as curvas de referência em uma ou ambas as direções pela largura da faixa até cobrir o talhão. Mantém a distância perpendicular igual à largura da faixa para cobertura completa.
- Flexibiliza a ortogonalidade quando as faixas se comprimem para manter a dirigibilidade
- Aplica suavização a cada faixa antes de gerar a próxima
- Gerencia a densidade de vértices para evitar trajetórias excessivamente complexas
Dupla Curva de Referência
Para talhões em terraços, concilia duas curvas de referência começando com a projeção ortogonal da primeira curva e adaptando-se gradualmente ao formato da segunda curva. Funciona melhor quando as curvas são ligeiramente diferentes.
Planejamento 3D de Terreno
Capacidade única de planejar em três dimensões, avaliando o potencial de erosão do solo e otimizando rotas para variações de elevação.
Modelagem de Terreno 3D
Constrói modelos de talhão 3D a partir de Modelos Digitais de Elevação (MDE) provenientes de dados públicos ou telemetria de equipamentos. Renderizados como rasters para extrair características topográficas como curvas de nível e divisões naturais de talhão.
Análise de Erosão do Solo
Utiliza a Equação Universal Revisada de Perda de Solo (RUSLE) para medir a perda de solo em função da precipitação, tipo de solo, práticas de cobertura, tipo de cultura e terreno.
Fator LS (Fator Comprimento-Declividade)
Produto do comprimento da rampa e do percentual de declividade - parâmetro fundamental para avaliar o efeito do terreno na erosão.
Faixas Retas 3D
Minimiza o potencial de perda de solo e otimiza o deslocamento morro acima e morro abaixo em áreas de alta declividade.
Faixas Curvas 3D
Processo de geração mais complexo com tratamento elegante da divisão de curvas e análise de declividade para evitar erros de ponto flutuante.

Análise de Planos
Estatísticas abrangentes e ferramentas de comparação para avaliar opções de rota e selecionar o plano ideal.
Estatísticas Resumidas do Plano
Gráficos de linha mostram valores resumidos entre as partes do talhão quando os talhões são decompostos e planejados separadamente.
Comparação Lado a Lado
Compare dois planos visual e estatisticamente para avaliar os compromissos. Inclui uma calculadora simples de comparação de custos.
- Sobreposição visual de diferentes opções de rota
- Comparação estatística de todas as métricas
- Análise de custo baseada em tempo, distância e sobreposição
- Compare planos em rascunho ou planos salvos

Exportar e Salvar
Exporte planos de rotas em múltiplos formatos compatíveis com todas as principais marcas de equipamentos e sistemas de orientação.
Formatos de Exportação
Formatos Específicos por OEM
- John Deere Operations Center
- CNHi (Case IH, New Holland)
- Trimble
Métodos de Entrega
- Direto para o FMIS OEM (sem fio para o equipamento)
- Download de arquivo para importação manual
- Sincronização automática com máquinas conectadas
Genérico
- ISO XML
- KML
- Shapefile
Formatos de Arquivo
- Agres
- CNH CN1
- FendtONE
- Hexagon
- Jacto
- JD File
- Precision Planting
- Raven
- Stara
- Topcon
- Trimble
Objetos Exportáveis
Orientação tradicional de linha única para sistemas básicos
Trajetórias completas de faixa para orientação avançada
Passadas de perímetro e áreas de curva
Limites externos e internos para controle de seções
Curvas, Manobras, Conectores de cabeceira e Travessias
Planos Salvos ("Decisões do Produtor")
Filtre e gerencie planos salvos por talhão, tipo de operação e data. Execute ações em múltiplos planos simultaneamente.
Colaboração
Compartilhe planos digitalmente com operadores e membros da equipe para validar decisões e fornecer instruções gráficas de tarefas.
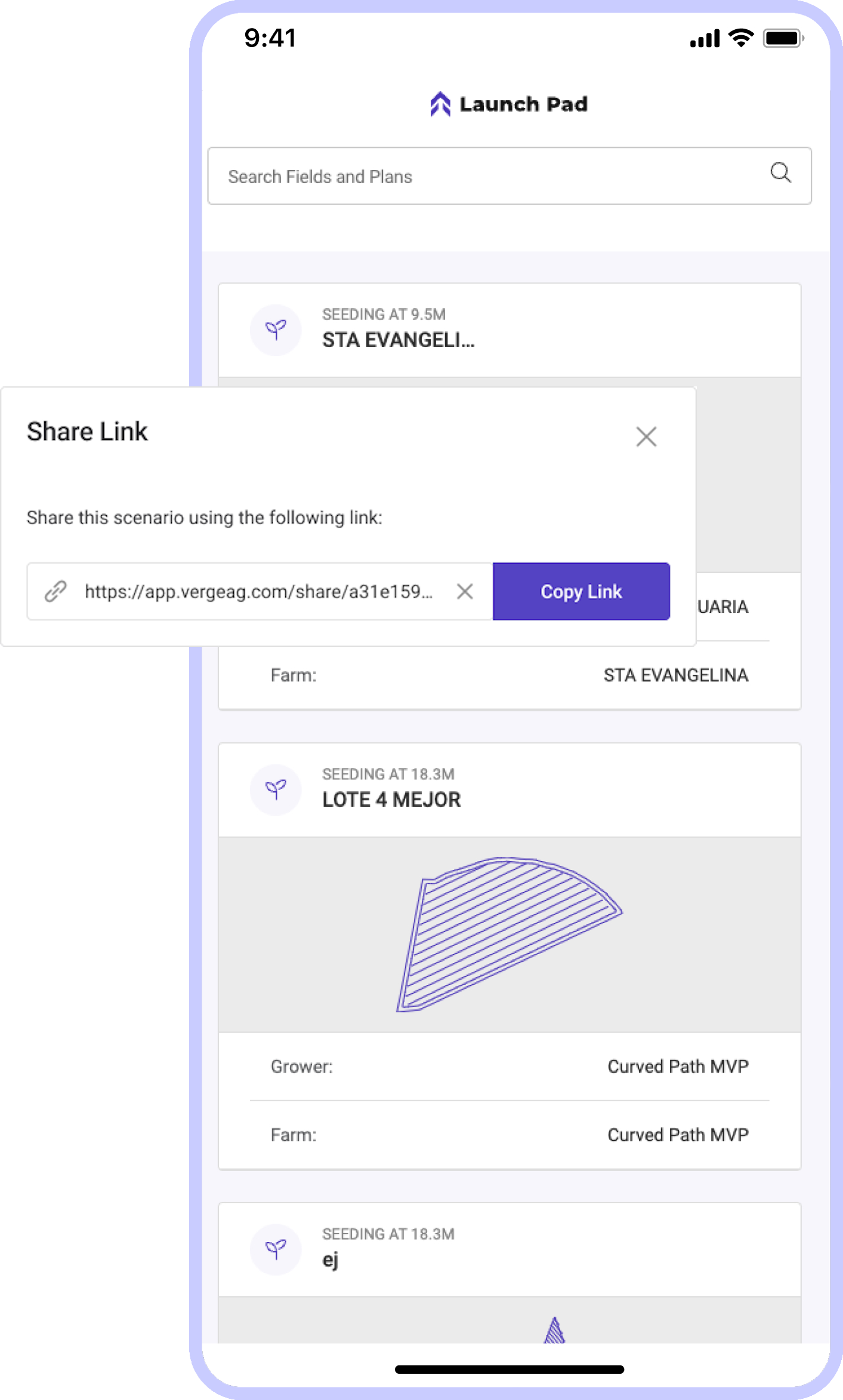
Compartilhamento de Planos
Recurso de colaboração fundamental incorporado ao ecossistema Launch Pad desde o primeiro dia. Compartilhe qualquer plano com membros da equipe para validação e feedback.
- Compartilhe com operadores, agrônomos e gerentes de fazenda
- A comunicação digital substitui as instruções verbais
- Garante que todos trabalhem com o mesmo plano
Instruções de Tarefa Baseadas em Rota
Planos compartilhados com rotas tornam-se instruções gráficas de tarefas. Enquanto os planos exportados orientam os equipamentos, os planos compartilhados em celulares/tablets informam os operadores sobre como concluir as operações.
Os operadores podem visualizar a rota completa, a sequência de curvas e o contexto operacional em dispositivos complementares enquanto executam o plano no campo.
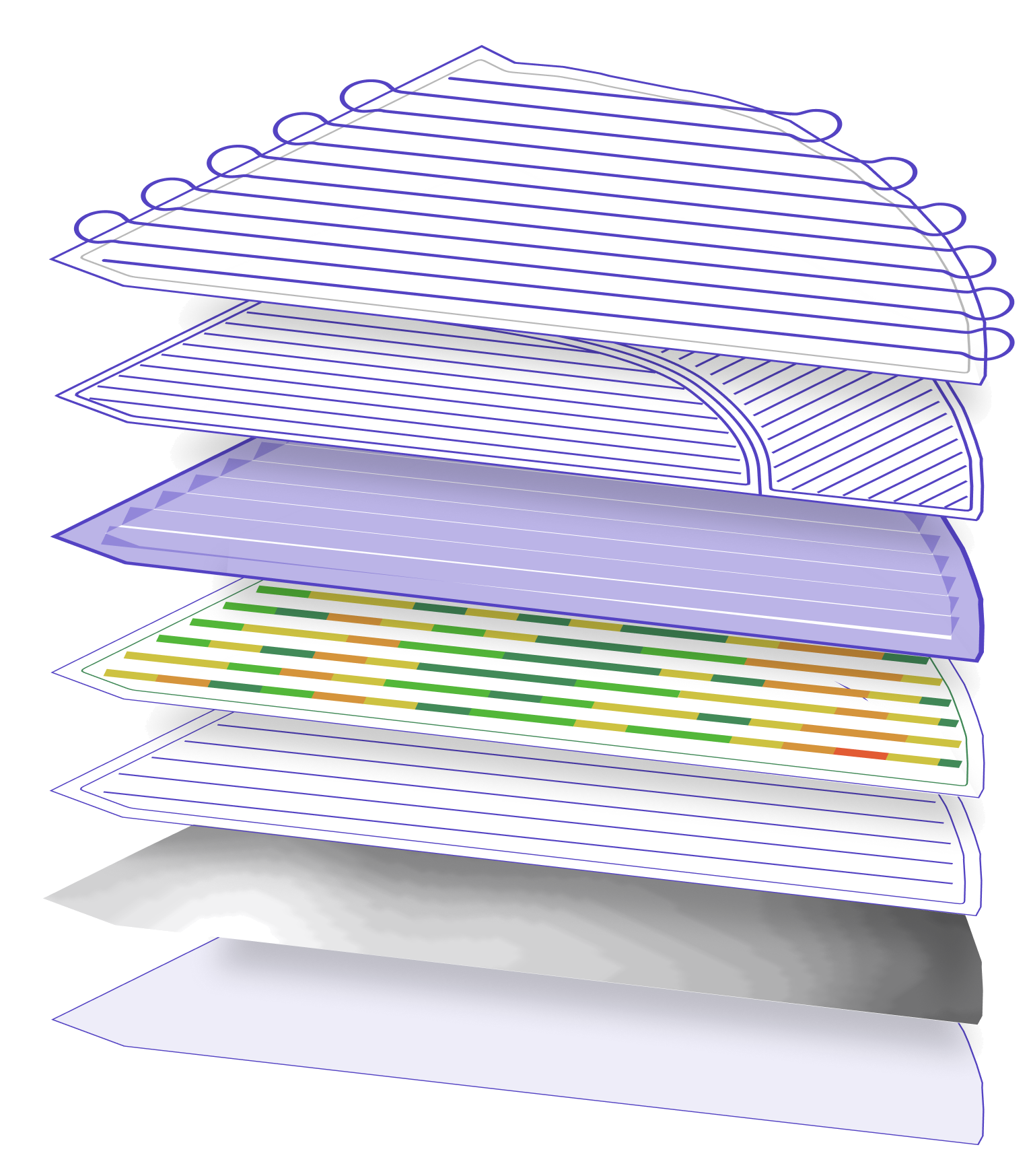
Gêmeo Digital
O Path Planner cria gêmeos digitais abrangentes de talhões ao sobrepor dados geométricos, físicos e operacionais.
Gêmeo Digital de Sete Camadas
-
1Camada de Rota Completa
Trajetória completa da máquina de ponta a ponta com curvas
-
2Camada do Plano de Rota
Trajetórias de movimento de equipamentos otimizadas
-
3Camada de Cobertura
Cobertura total do implemento com sobreposição minimizada
-
4Camada de Declividade
Otimização de declividade para equipamentos e controle de erosão
-
5Camada de Decomposição
Partições de subtalhão para eficiência operacional
-
6Camada de Topografia
Representação 3D do terreno com dados de elevação
-
7Camada de Geometria do Talhão
Características dos limites e análise de forma
Agregação em Nível de Fazenda
Os gêmeos digitais de talhões individuais se agregam em um gêmeo digital abrangente da fazenda. Isso permite a otimização do gerenciamento de terras em toda a fazenda, o design da frota de equipamentos e o planejamento operacional em todos os talhões e operações.
Geração de Rota Completa
Rotas completas de ponta a ponta incluindo trajetórias, curvas, sequenciamento e conexões de ponto de início/fim, essenciais para sistemas autônomos.
Capacidades Abrangentes de Roteamento
Nossa solução de roteamento de última geração suporta talhões arbitrariamente complexos com modelagem sofisticada de curvas, navegação de cabeceira e otimização inteligente de trajetórias.
- Modelagem Inteligente de Curvas: Seleciona automaticamente os tipos de curva ideais (curvas em U, curvas em bulbo, curvas em P) com base na geometria do talhão e nas características do equipamento.
- Navegação Avançada de Cabeceira: Permite a travessia eficiente entre áreas do talhão com opções configuráveis para padrões de cabeceira primeiro ou cabeceira por último, preferência pela cabeceira mais externa e travessias completas de cabeceira em torno de obstáculos complexos.
- Algoritmo de Roteamento Proprietário: Calcula distâncias entre todos os pares de faixas para criar uma trajetória otimizada que minimiza a distância não produtiva ao lidar com talhões irregulares, zonas de exclusão e múltiplos obstáculos.
- Roteamento por Capacidade: Planeje pontos de reabastecimento e otimize rotas com base na capacidade e taxa de fluxo do veículo. Fluxos de trabalho de veículo único suportam pontos de reabastecimento exatos, posicionamento no início da faixa ou posicionamento na cabeceira exterior mais próxima. O roteamento de área de estacionamento para múltiplos veículos (CVRP) otimiza as operações de frota com veículos retornando aos depósitos de estacionamento quando a capacidade é atingida.
- Capacidades Adicionais: Recursos experimentais como suavização dirigível e suporte a implementos rebocados, além de extensas opções de configuração para corresponder às suas preferências operacionais.
Veja em Ação
Explore exemplos detalhados, demonstrações visuais e explicações aprofundadas de todas as capacidades de roteamento
Explore a Vitrine Completa de Roteamento